توازن خدمات › دو طیاری (متحرک) توازن
دو طیاری (متحرک) توازن — طریقہ، طبیعیات اور میدانی طریقہ کار
جب کوئی روٹر اتنا چوڑا ہو کہ ہر سرے پر عدم توازن مختلف ہو، تو ایک واحد تصحیح کی سطح کافی نہیں ہے۔ دو طیاری متحرک توازن بیک وقت جامد اور جوڑی دونوں اجزاء کو درست کرتا ہے — استعمال کرتے ہوئے اثر کے گتانک کا طریقہ — تاکہ روٹر صرف اپنے مرکز میں نہیں بلکہ اپنی پوری لمبائی میں صاف دوڑتا ہے۔
مختصراً: دو طیاری (متحرک) توازن ہر بار ضروری ہے جب کوئی روٹر جامد عدم توازن اور جوڑی کا جزو دونوں رکھتا ہے — یعنی شافٹ کی محور کے ساتھ عدم توازن پھیلا ہوا ہے نہ کہ ایک ڈسک میں مرکوز۔ شافٹ پر روٹر کے جواب کو ماپنے کے لیے ہر بیئرنگ ہاؤسنگ میں ایک کمپن سنسر اور ایک لیزر ٹیکومیٹر استعمال کیا جاتا ہے جو بری وزن رکھے جاتے ہیں؛ Balanset-1A پھر دونوں طیاریوں میں بیک وقت صحیح تصحیح کتلہ اور زاویہ کے لیے حل تلاش کرتا ہے۔ مشین سے نکالنے کی ضرورت نہیں ہے — مکمل چار رن کا طریقہ کار آپریٹنگ رفتار پر، روٹر کی اپنی بیئرنگ میں، بیشتر روٹرز کے لیے ایک گھنٹے سے کم میں مکمل ہوتا ہے۔
اشارات کہ آپ کے روٹر کو دو طیاری توازن کی ضرورت ہے
ایک واحد طیاری تصحیح ایک بیئرنگ کو خاموش کر سکتی ہے جبکہ دوسری ابھی بھی لرزتی ہے۔ اگر آپ یہ کوئی بھی نمونہ دیکھتے ہیں، تو دو طیاری علاج صحیح جواب ہے:
سنگل پلین بمقابلہ ٹو پلین: آپ کو کب ٹو پلین کی ضرورت ہے؟
ایک اور دو کریکشن پلین کے درمیان انتخاب روٹر کی جیومیٹری اور اس کے انبیلنس کی نوعیت پر منحصر ہے۔ انبیلنس کی تینوں اقسام کو سمجھنے سے آپ فوری طور پر فیصلہ کر سکتے ہیں۔
انبیلنس کی تینوں اقسام
جامد عدم توازن — کتلے کا مرکز روٹیشن ایکسس سے ہٹا ہوا ہے لیکن پرنسپل انرشیا ایکسس اس کے موازی ہے۔ ایک کریکشن پلین کافی ہے: بھاری جانب ماس شامل کریں اور روٹر بیلنس ہو جاتا ہے۔ عام روٹر: سنکی پلیز، تنگ گرائنڈنگ ویلز، سنگل پلین فین ڈسکس۔
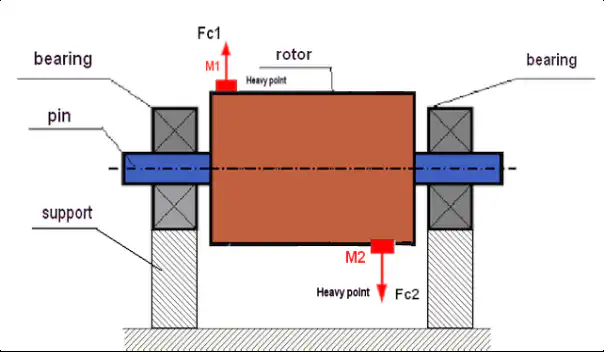
جوڑے میں عدم توازن — کتلے کا مرکز ایکسس پر ہے لیکن پرنسپل انرشیا ایکسس جھکا ہوا ہے۔ روٹر ہلتا ہے بجائے لرزتے ہوئے۔ یہ ایک پلین میں درست نہیں کیا جا سکتا؛ دو الگ پلین میں 180 ڈگری کے فاصلے پر برابر اور مخالف ماس کی ضرورت ہے تاکہ راکنگ موومنٹ کو منسوخ کیا جا سکے۔ عام روٹر: لمبے بیلناکار ڈرمز، موٹر آرمیچرز، شافٹ اسمبلیز۔
ڈائنامک (مشترکہ) انبیلنس — عمومی صورت: سٹیٹک اور کپل دونوں اجزاء موجود ہیں۔ کریکشن کے لیے شافٹ کے ساتھ من مانے طریقے سے منتخب دو پلین کی ضرورت ہے۔ تمام حقیقی پروڈکشن روٹرز اس زمرہ میں آتے ہیں۔
| عامل | سنگل پلین (سٹیٹک) | ٹو پلین (ڈائنامک) |
|---|---|---|
| روٹر کی شکل | پتلی ڈسک؛ محوری چوڑائی قطر سے بہت کم | وسیع روٹر؛ محوری چوڑائی قطر کے برابر یا بڑی |
| Unbalance type | صرف سٹیٹک انبیلنس | کپل یا مشترکہ (ڈائنامک) انبیلنس |
| L/D تناسب (محوری لمبائی / قطر) | L/D < 0.5 (تقریباً) | L/D ≥ 0.5، یا روٹر اپنی پہلی کریٹیکل سپیڈ سے زیادہ ہے |
| سینسرز کی تعداد | 1 کمپن سنسر + 1 لیزر ٹیکو | 2 کمپن سنسر + 1 لیزر ٹیکو |
| پیمائش کے دوڑ کی تعداد | 3 دوڑیں (بنیاد + آزمائش + اصلاح) | 4 دوڑیں (بنیاد + طیارہ-1 آزمائش + طیارہ-2 آزمائش + اصلاح) |
| اصلاحی طیارے | 1 | 2 |
| عام سازوسامان | تنگ پنکھے کے impellers، چھاتی، ایک درجے کی ڈسک | ڈرم، ڈرائیو شافٹ، وسیع impellers، کثیر درجے کے rotors، موٹر rotors |
| معیاری حوالہ | ISO 21940-11 (1-طیارہ سخت rotor) | ISO 21940-11 (2-طیارہ سخت rotor) |
انگوٹھے کا اصول: اگر ایک بیرنگ پر ماپا گیا rotor کمپن جب آپ ٹرائل وزن منتقل کرتے ہیں تو دوسری بیرنگ پر کمپن کے برعکس سمت میں بدل جاتا ہے، تو آپ کے پاس ایک جوڑی اجزاء ہے اور دو طیارے درکار ہیں۔
وسیع rotors نے متحرک توازن کیوں کھویا — اور یہ کتنی لاگت ہے
جب ایک rotor تیار یا مرمت کیا جاتا ہے، تو ماس شاید اس کے محور کے ساتھ متوازی طریقے سے تقسیم نہیں ہوتا۔ کٹاؤ ایک impeller کے ایک سرے کو دوسرے سے تیزی سے کھاتا ہے؛ شام کی مرمت ایک واحد محوری سٹیشن پر مادہ شامل کرتی ہے؛ مصنوعات کا تعمیر ایک ڈرم کے ساتھ یکساں طریقے سے جمع ہوتا ہے۔ نتیجہ صرف اسٹاٹک عدم توازن نہیں بلکہ ایک جوڑے اجزاء جو ایک رانڈے لمحے کو بناتا ہے۔ صرف بیک وقت دونوں طیاروں میں اصلاح دونوں کو ختم کرتی ہے۔ کیونکہ سینٹرفیوگل قوت مربع rotational رفتار میں اضافہ، 500 RPM پر ایک معمولی جوڑی عدم توازن 3,000 RPM پر ایک تباہ کن قوت بن جاتا ہے۔
جوڑی اجزاء کو نظر انداز کرنے کا مطلب ہے کہ دونوں بیرنگ ہر انقلاب میں بلند متحرک بوجھ رکھتے ہیں۔ بیرنگ تھکاوٹ جمع ہوتی ہے، سیل ناکام ہوتے ہیں، fasteners ڈھیلے ہو جاتے ہیں، اور ساختی شقیں mounting پاؤں سے باہر کی طرف پھیلتی ہیں۔ اقتصادی نقصان — بیرنگ، سیل، کھویا ہوا پروڈکشن، ایمرجنسی محنت — عام طور پر ایک مناسب دو طیاروں کی کام کی لاگت کو کئی بار سے زیادہ ہے۔
کمپن کو نصف کرنے سے بیرنگ کی عمر کیوں بڑھ جاتی ہے
دو طیاروں کی توازن — مرحلہ وار میدانی طریقہ کار
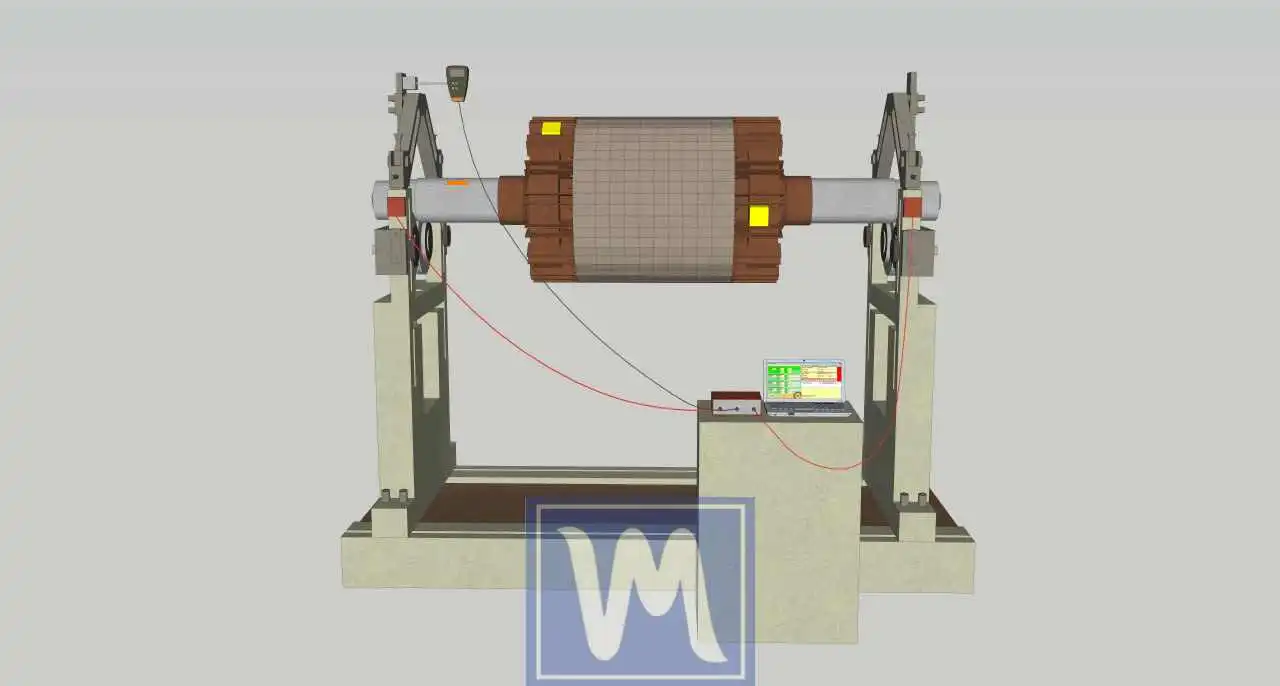
Balanset-1A اثر سہ نافذ طریقے کو لاگو کرتا ہے۔ دو کمپن سنسر اور ایک لیزر ٹیکو rotor کو مکمل طور پر نمایاں کرتے ہیں اور ایک ہی آن سائٹ سیشن میں دونوں اصلاح طیاروں کو حل کرتے ہیں:
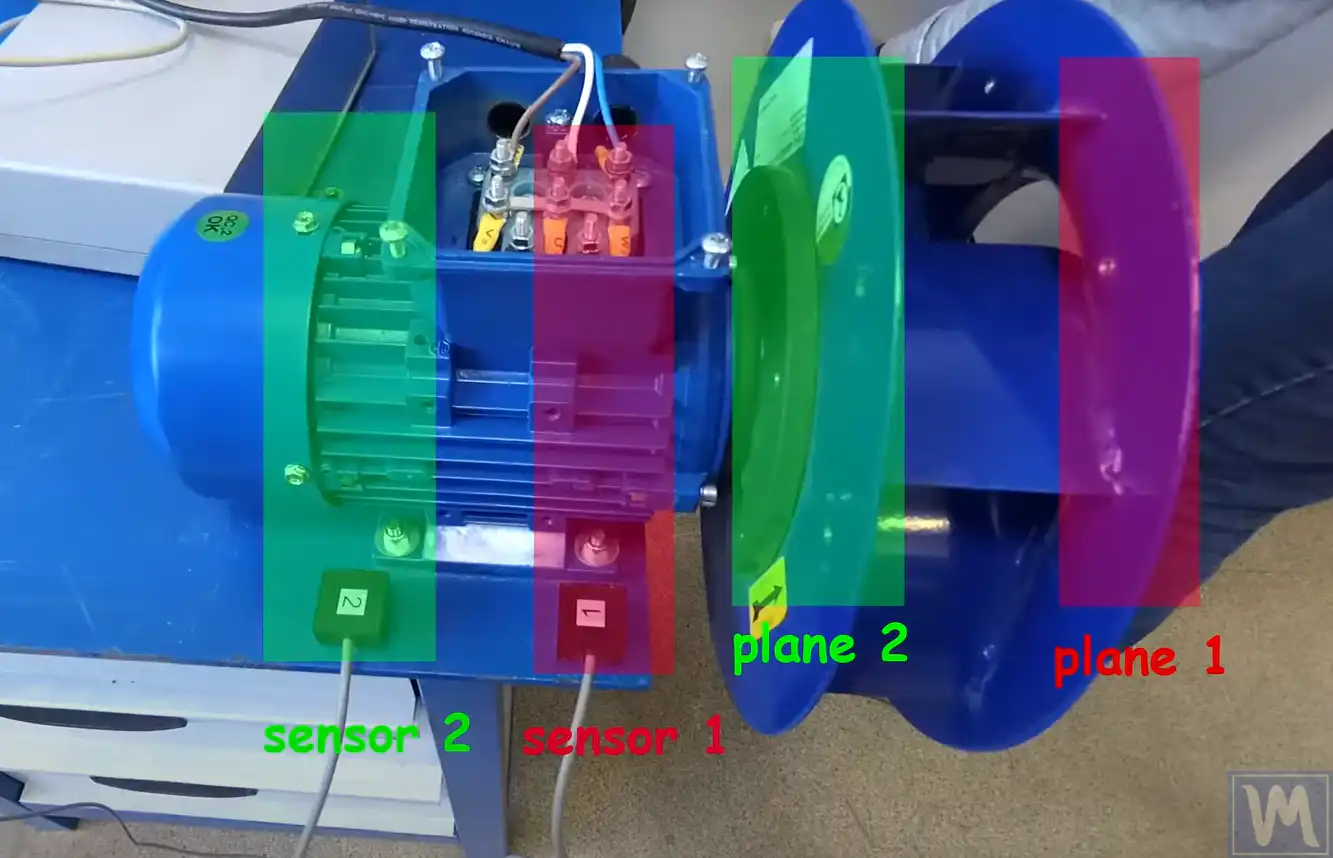
- سینسر لگائیں۔ ہر بیئرنگ ہاؤسنگ (طیارہ 1 اور 2) پر ایک کمپن ایکسیلروومیٹر لگائیں اور لیزر ٹیکوومیٹر کو شافٹ پر ایک عکاس پٹی کی طرف رکھیں۔ کوئی سوکھا نہیں ہے درکار — روٹر پوری طریقہ کار میں معمول کی آپریٹنگ حالات میں چلتا ہے۔
- بنیادی سطح کو ناپیں۔. مکمل آپریٹنگ رفتار پر ایک چلنا کمپن کی وسعت اور مرحلہ زاویہ کو بیک وقت دونوں بیئرنگ مقامات پر ریکارڈ کرتا ہے، ابتدائی 1× RPM ویکٹر فراہم کرتے ہوئے جو دونوں طیاروں میں ابتدائی عدم توازن کی حالت کی تعریف کرتے ہیں۔
- طیارہ 1 میں ایک آزمائشی وزن شامل کریں۔ ایک معروف بڑے پیمانے پر پہلی اصلاح طیارے میں ایک نشان شدہ کونیی مقام پر کلیپ کیا جاتا ہے۔ ایک دوسری دوڑ ریکارڈ کرتی ہے کہ یہ وزن کمپن کو کیسے متاثر کرتا ہے دونوں بیئرنگ مقامات، چار میں سے دو اثر کوعیشنٹس کو حاصل کرتے ہوئے۔
- آزمائشی وزن کو طیارہ 2 میں منتقل کریں۔ اسی بڑے پیمانے پر دوسری اصلاح طیارے میں دوبارہ مقام دیا جاتا ہے اور ایک اور دوڑ دونوں سینسر پر کراس اثر ریکارڈ کرتی ہے۔ آلہ اب 2×2 نظام کے لیے تمام چار اثر کوعیشنٹس ہے۔
- ڈیوائس کو حساب لگانے دیں۔. Balanset-1A دو طیاروں کو اصلاح کرنے والے کوعیشنٹس کی مساوات حل کرتا ہے اور بیک وقت ہر طیارے کے لیے بالکل درست اصلاح بڑے پیمانے پر اور کونیی مقام کا نتیجہ نکالتا ہے — کوئی دستی ریاضی کی ضرورت نہیں۔
- اصلاحات لگائیں اور تصدیق کریں۔ اصلاح کے وزن دونوں طیاروں پر حساب کی گئی مقامات پر رکھے جاتے ہیں۔ ایک حتمی دوڑ تصدیق کرتی ہے کہ بقیہ عدم توازن ISO 21940-11 رواداری کے اندر ہے مخصوص G درجے کے لیے، اور Balanset-1A ایک دستاویزی توازن رپورٹ محفوظ کرتا ہے۔
ہم دو طیاروں میں کیا توازن رکھتے ہیں
- وسیع سینٹرفیوگل فین امپیلرز اور ڈبل انلیٹ بلوئرز
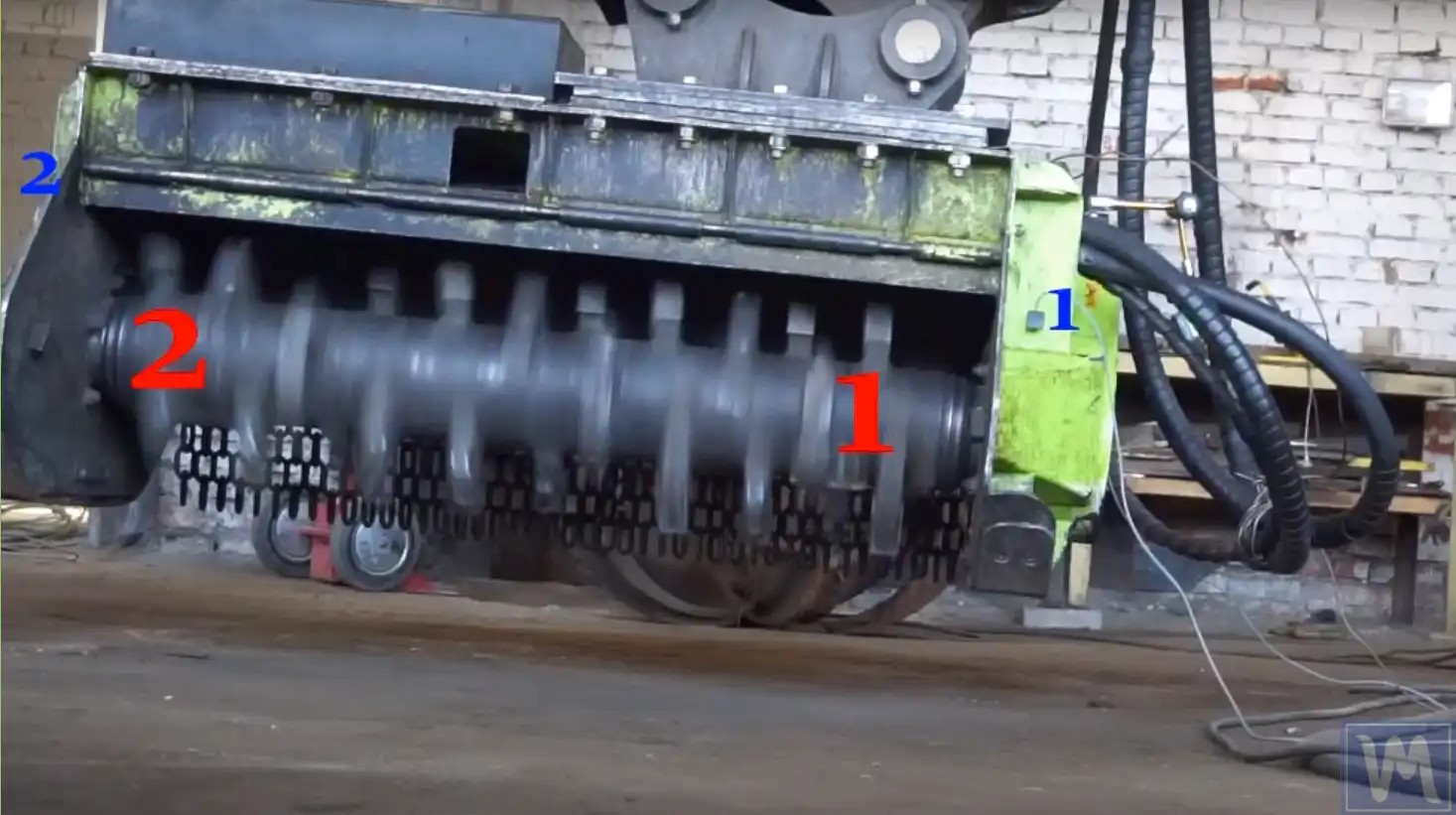
- کمبائن ہارویسٹر تھریشنگ اور کاٹنے والے ڈرمز
- ڈرائیو شافٹ اور کارڈن شافٹ
- ملٹی سٹیج پمپ روٹرز اور کمپریسر امپیلر سٹیکس
- پیپر مشین رولز اور پرنٹنگ / کوٹنگ سلنڈرز
- سکریو کنویئرز اور آگرز ~500 mm سے زیادہ لمبے
- موٹر روٹرز اور جنریٹر روٹرز نمایاں محوری لمبائی کے ساتھ
- ٹربو چارجر روٹرز اور بھاپ ٹربائن روٹرز (فیلڈ کمپن تصدیق)
- کوئی بھی روٹر جہاں سنگل طیارہ اصلاح ایک بیئرنگ کو ابھی بھی ہلتی ہوئی چھوڑ دیتی ہے
برداشت اور معیارات
آئی ایس او 21940-11 (سابقہ ISO 1940-1) سخت روٹرز کے لیے G0.4 سے G4000 تک توازن کے معیار کی درجات کی تعریف کرتا ہے۔ دو طیاروں میں توازن ضروری طریقہ ہے جب بھی روٹر محوری لمبائی سے قطر کی نسبت تقریباً 0.5 سے زیادہ ہو، یا جب روٹر اپنی پہلی اہم رفتار سے اوپر کام کرے۔ طیارے کے لیے قابلِ قبول بقیہ عدم توازن کا حساب اس طرح لگایا جاتا ہے:
یوفی (g·mm) = eفی × m / 2, where eفی = G × 9549 / n (mm/s × rpm → μm eccentricity)، m روٹر کا بڑھتا ہوا حصہ کلوگرام میں ہے، اور یہ عامل 2 رواداری کو دونوں طیاروں میں تقسیم کرتا ہے۔
پنکھے کے روٹرس عام طور پر متوازن ہوتے ہیں جی6.3 یا جی ٹو ڈاٹ فائیو فی آئی ایس او 14694؛ درست مشین ٹول spindles اور تیز رفتار ٹربو سامان مقصد جی ایک نقطہ صفر یا زیادہ اچھی معیار کے۔ ہماری استعمال کریں باقی ماندہ عدم توازن کیلکولیٹر اپنے G-گریڈ، روٹر کی کمیت اور سروس کی رفتار کے لیے قابل قبول رواداری تلاش کرنے سے پہلے کام شروع کریں۔
Balanset-1A — آپ کا مکمل فیلڈ بیلنسنگ کٹ
کسی بھی سخت روٹر کو دوطرفہ متوازن کرنا — پنکھے، ڈرمز، ڈرائیو شافٹس، کثیر مرحلہ پمپ اسمبلیاں — ایک پورٹیبل آلے سے کیا جاتا ہے: بیلنسیٹ -1 اے۔ یہ ایک دو چینل متوازن کار اور کمپن تجزیہ کار ہے جو روٹرس کو متوازن کرتا ہے اپنی اپنی بیئرنگز میں، آپریٹنگ رفتار پر، اثر کے نسبتی طریقے کا استعمال کرتے ہوئے — ایک طیارہ تین رن میں، دونوں طیاریں چار میں۔ سافٹ ویئر دونوں طیاروں کے لیے صحیح تصحیح کی کمیت اور زاویہ کا حساب لگاتا ہے اور رپورٹ محفوظ کرتا ہے۔

مکمل کٹ میں کیا شامل ہے؟
€1,975 · مکمل کٹ، اسٹاک میں موجود، ویلیو ایڈیڈ ٹیکس انوائس
- انٹرفیس پیمائش یونٹ (یو ایس بی، 2 چینلز)
- دو کمپن تیزرفتاری سینسر (4 میٹر کیبل، 10 میٹر اختیاری)
- لیزر ٹیچومیٹر / آپٹیکل فیز سینسر (50–500 ملی میٹر)
- سینسر کے لیے مقناطیسی اسٹینڈ
- آزمائش اور اصلاحی وزنوں کے لیے ڈیجیٹل ترازو
- ونڈوز بیلنسنگ اور تجزیاتی سافٹ ویئر
- پلاسٹک ٹرانسپورٹ کیس
مکمل کٹ
یونٹ · 2 سینسر · لیزر tachometer · مقناطیسی سٹینڈ · ڈیجیٹل پیمانہ · سافٹ ویئر · نقل کا کیس۔ دوطرفہ متوازن کرنے سے شروع کرنے کے لیے ضروری تمام چیزیں براہ راست ڈبے سے۔
او ای ایم سیٹ
یونٹ · 2 سینسرز · لیزر ٹیچومیٹر · سافٹ ویئر۔ انضمام کرنے والوں کے لیے جو پہلے ہی اسٹینڈ، ترازو اور کیس رکھتے ہیں، یا جو یونٹ کو بیلنسنگ مشین میں نصب کرتے ہیں۔.
| پیرامیٹر | قدر |
|---|---|
| پیمائش کے چینلز | 2 (سنگل اور ٹو-پلین بیلنسنگ) |
| کمپن کی رفتار کی حد | 0.05–100 ملی میٹر فی سیکنڈ |
| تعدد کی حد | 5–300 ہرٹز |
| ماپنے کی درستگی | مکمل پیمانے کے ±5% |
| طریقہ | 3-رن اثر کا ضریب (1 یا 2 طیارے) |
| تجزیہ | 1× پر ایمپلیٹیوڈ اور فیز، FFT اسپیکٹرم اور ویو فارم، محفوظ شدہ رپورٹس |
| لیپ ٹاپ | شامل نہیں (ونڈوز پی سی، درخواست پر دستیاب) |
حقیقی دوطرفہ متوازن کاری کے معاملات


دوطرفہ متوازن کاری — فیلڈ سے
اثر نسبتی ترتیب
دو سینسرز اور ایک لیزر tacho دونوں تصحیح کی طیاروں کو بیک وقت خصوصیات کے لیے مقرر۔
جگہ میں متوازن
روٹر اپنی بیرنگز میں رہتا ہے اور آپریٹنگ رفتار پر درست کیا جاتا ہے — ہٹانے کی ضرورت نہیں۔
دونوں صفحات حل شدہ
تصحیح کی کمیت اور زاویہ دونوں ہی صفحہ 1 اور صفحہ 2 کے لیے ایک سیشن میں بیک وقت شمار کیے جاتے ہیں۔
تصدیق شدہ نتیجہ
حتمی رن دونوں صفحات پر ISO 21940-11 رواداری کے اندر بقایا غیر توازن کی تصدیق کرتا ہے۔
دو صفحات کی توازن کے لیے مفت کیلکولیٹر
دو صفحات کی توازن FAQ
ایک صفحہ کی توازن کب کافی ہے؟
دونوں صفحات کے لیے اثر-گتانک کا طریقہ کیسے کام کرتا ہے؟
ایک دو صفحات کے کام کے لیے کتنے پیمائش کے رن درکار ہیں؟
کیا مجھے روٹر کو مشین سے نکالنا ہے؟
اپنے روٹر کے لیے مجھے کون سا توازن معیار لکسیت رکھنا چاہیے؟
کیا ہماری دیکھ بھال کی ٹیم Balanset-1A کے ساتھ دو صفحات کی توازن کر سکتی ہے؟
نظریہ سیکھیں
دونوں طیاروں کو ایک مرتبہ میں حل کریں — کام کی رفتار پر، ہٹائے بغیر
Balanset-1A آپ کو مکمل دو-طیارہ اثر-کوفیشنٹ طریقے سے رہنمائی کرتا ہے: بیس لائن، طیارہ 1 ٹریل، طیارہ 2 ٹریل، اصلاح اور تصدیق — سب کچھ چل رہی رفتار پر، روٹر’s اپنی بیئرنگز میں۔ ISO 21940-11، ISO 14694 اور API 610 کے لیے دستاویز شدہ بقایا عدم توازن۔ شپنگ کے لیے تیار۔
