গতিশীল ভারসাম্য (দুই-সমতল ভারসাম্য) ব্যাখ্যা করা হয়েছে







1. সংজ্ঞা: গতিশীল ভারসাম্য কী?
গতিশীল ভারসাম্যকরণ একটি রোটরে ভারসাম্যহীনতা সংশোধনের একটি পদ্ধতি অসাম্য সর্বনিম্ন সংখ্যায় ভর সংশোধন করার মাধ্যমে দুটি পৃথক সংশোধন সমতল এর দৈর্ঘ্য জুড়ে। এটি ব্যবহার করা হয় যখন একটি সমতলে সংশোধন যথেষ্ট নয়, কারণ রোটর সংমিশ্রণ করতে পারে স্ট্যাটিক (বল) অসন্তুলন এবং যুগল ভারসাম্যহীনতা.
2. স্থিতি বনাম গতিশীল ভারসাম্যহীনতা: মূল পার্থক্য
গতিশীল ভারসাম্য বুঝতে, ভারসাম্যহীনতার দুটি প্রধান ফর্ম আলাদা করা গুরুত্বপূর্ণ।
- স্ট্যাটিক অসামঞ্জস্য: রোটরের ভর কেন্দ্র তার ঘূর্ণন অক্ষ থেকে সরানো হয়েছে। এটি একটি একক "ভারী স্থান" এর মতো আচরণ করে এবং এক সমতলে একটি ওজন দিয়ে সংশোধন করা যায় (স্ট্যাটিক ভারসাম্যকরণ, যাকে বলা হয় একক-সমতল ব্যালান্সিং).
- গতিশীল অসন্তুলন: অসন্তুলন সমগ্র রোটর জুড়ে বিতরণ করা হয় যাতে একটি সমতলে সংশোধন যথেষ্ট নয়। এই অবস্থা ঘূর্ণনে শনাক্ত হয় এবং দুটি ভিন্ন সমতলে সংশোধন প্রয়োজন। এটি ঘটে যখন একটি রোটরের বিপরীত প্রান্তে দুটি সমান ভারী স্থান থাকে, যা 180° দূরত্বে অবস্থিত। এই অবস্থা স্থিরভাবে সন্তুলিত (বিশ্রামে ভারী স্থানে গড়িয়ে যাবে না), কিন্তু যখন এটি ঘোরে, দুটি ভারী স্থান একটি ঘূর্ণন শক্তি, বা “যুগল,” তৈরি করে যা রোটরকে প্রান্তের উপর দিয়ে দুলতে সৃষ্টি করে। যুগল অসন্তুলন *শুধুমাত্র* রোটর স্পিন করার সময় শনাক্ত করা যায় এবং *শুধুমাত্র* একটি বিপরীত যুগল তৈরি করতে দুটি ভিন্ন সমতলে ওজন স্থাপন করে সংশোধন করা যায়।
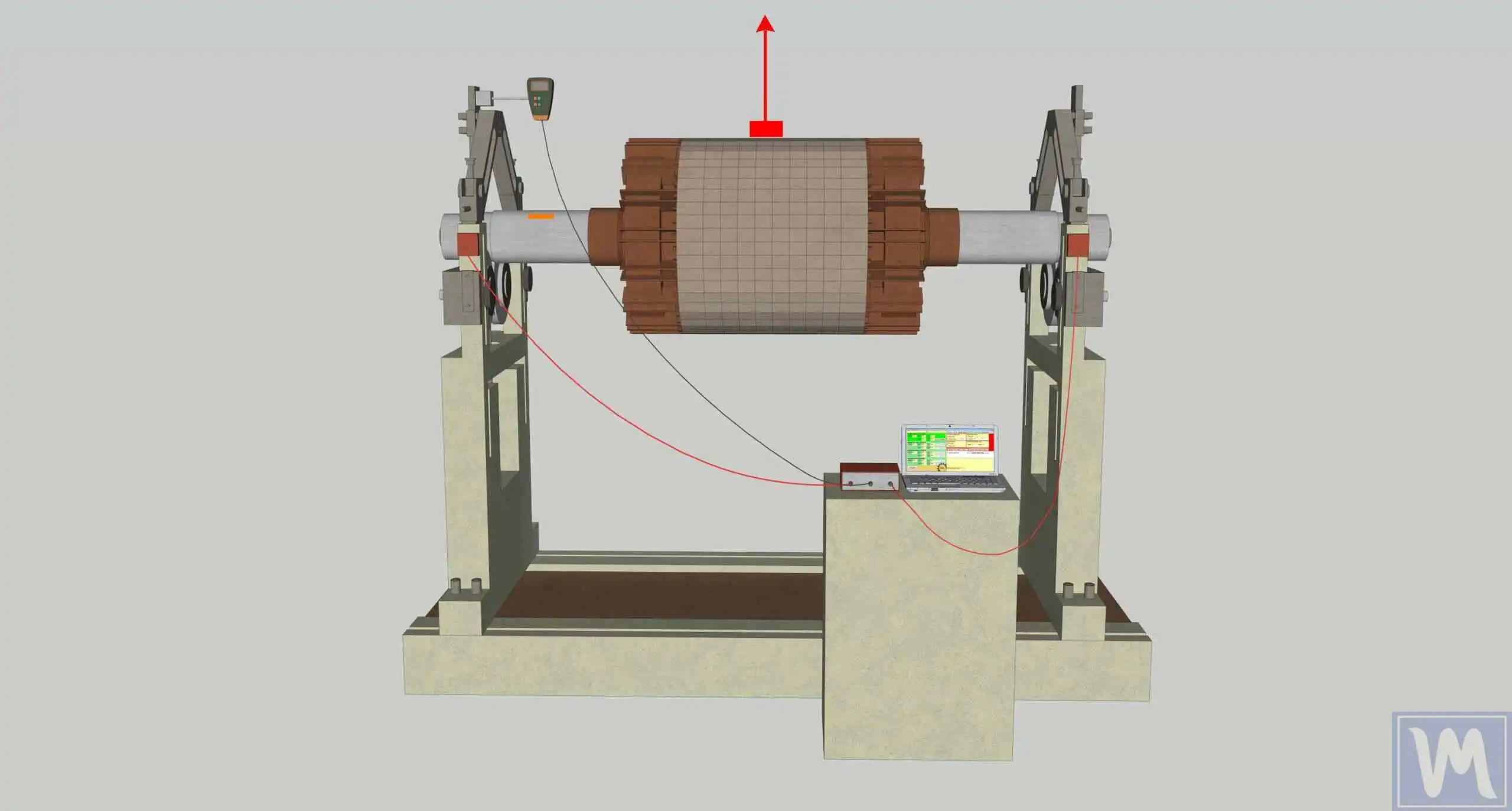
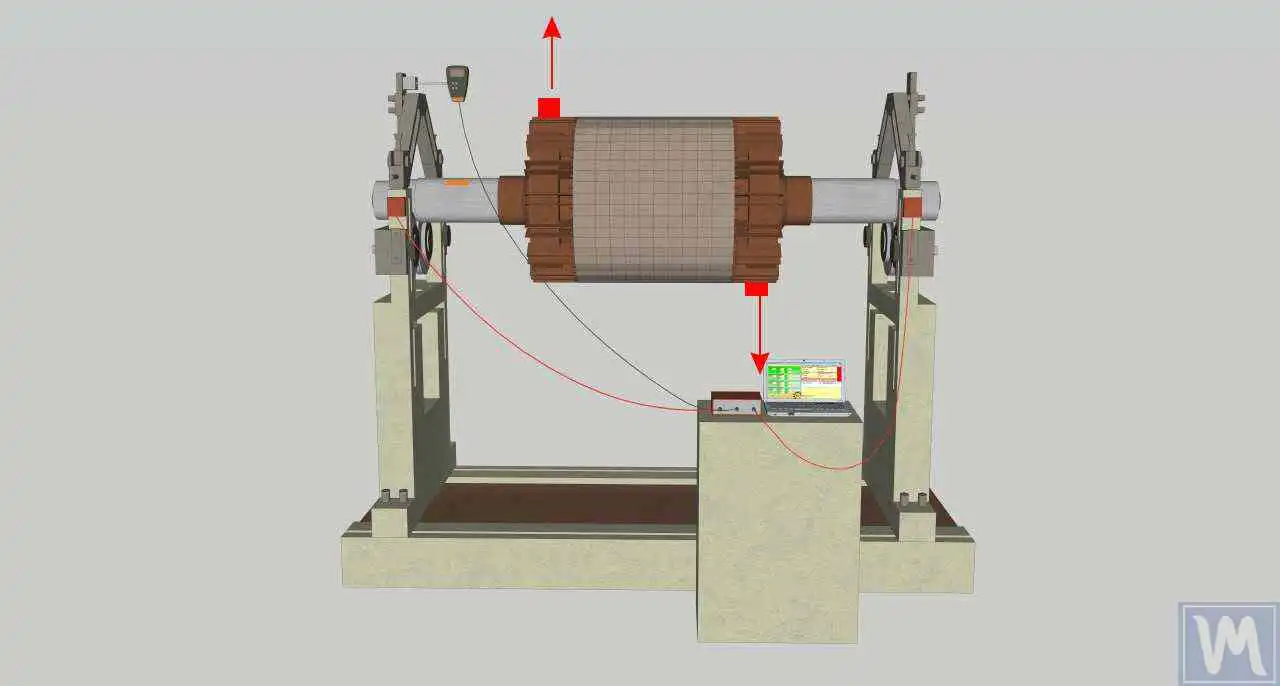
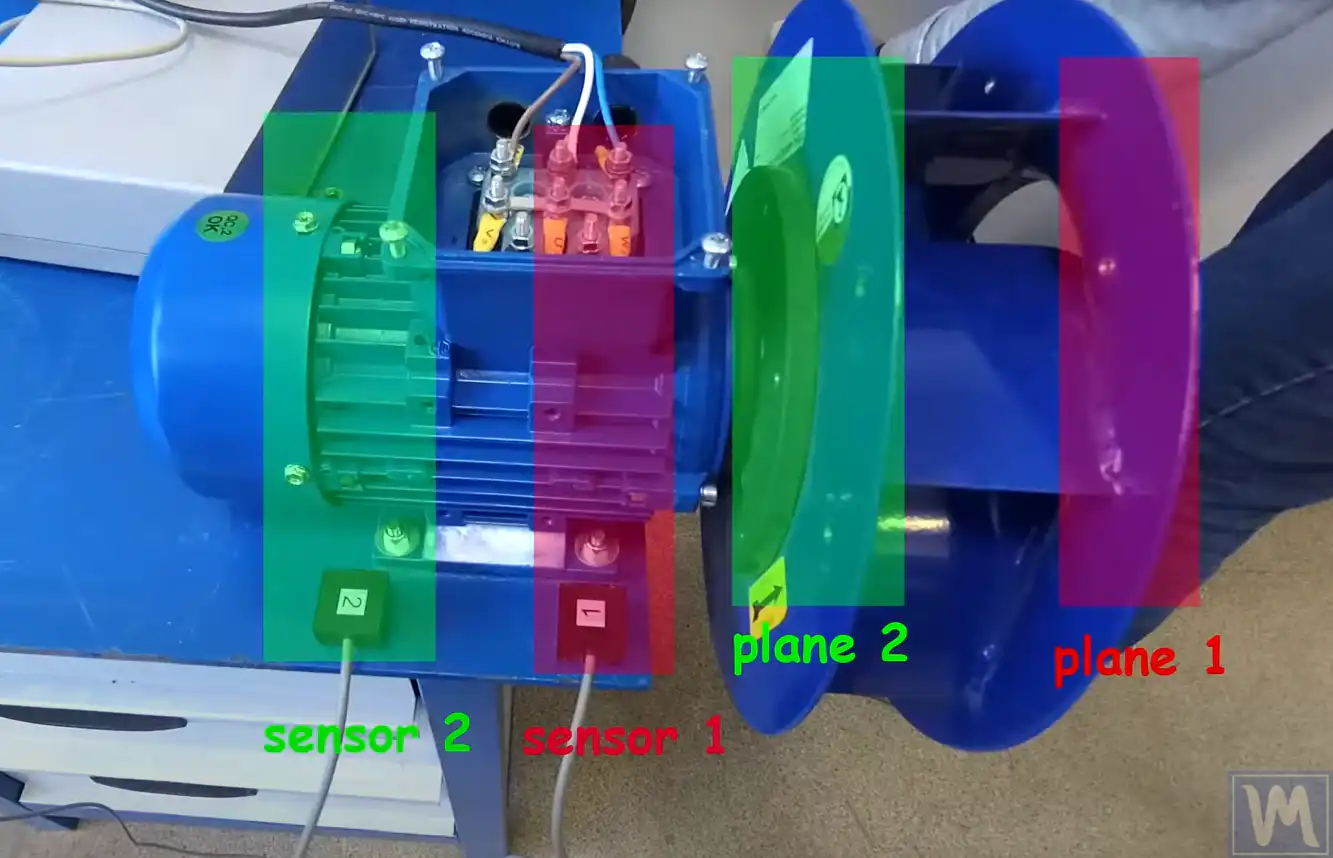
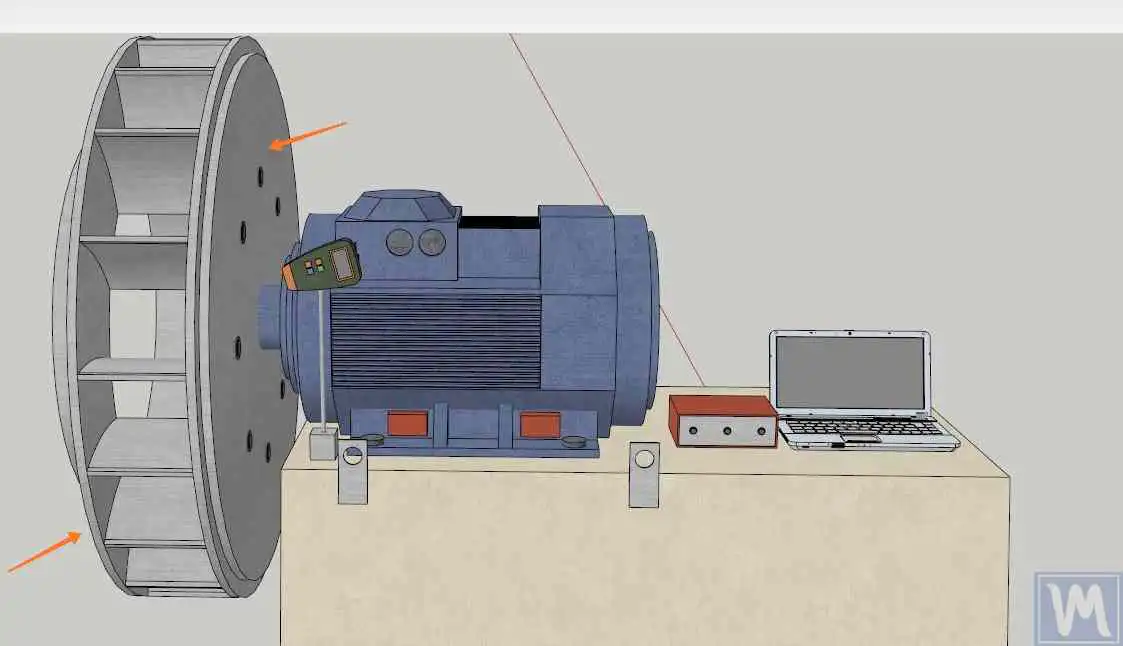
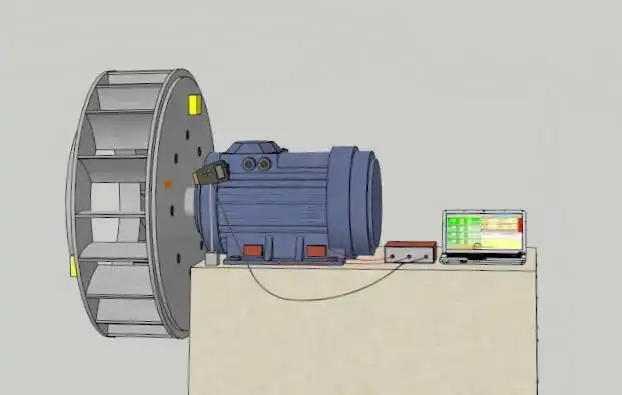
3. সংশোধন সমতল এবং সেন্সর স্থাপনা
দুই-সংশোধন সমতল ভারসাম্যকরণ তিনটি জিনিসের উপর ভিত্তি করে:
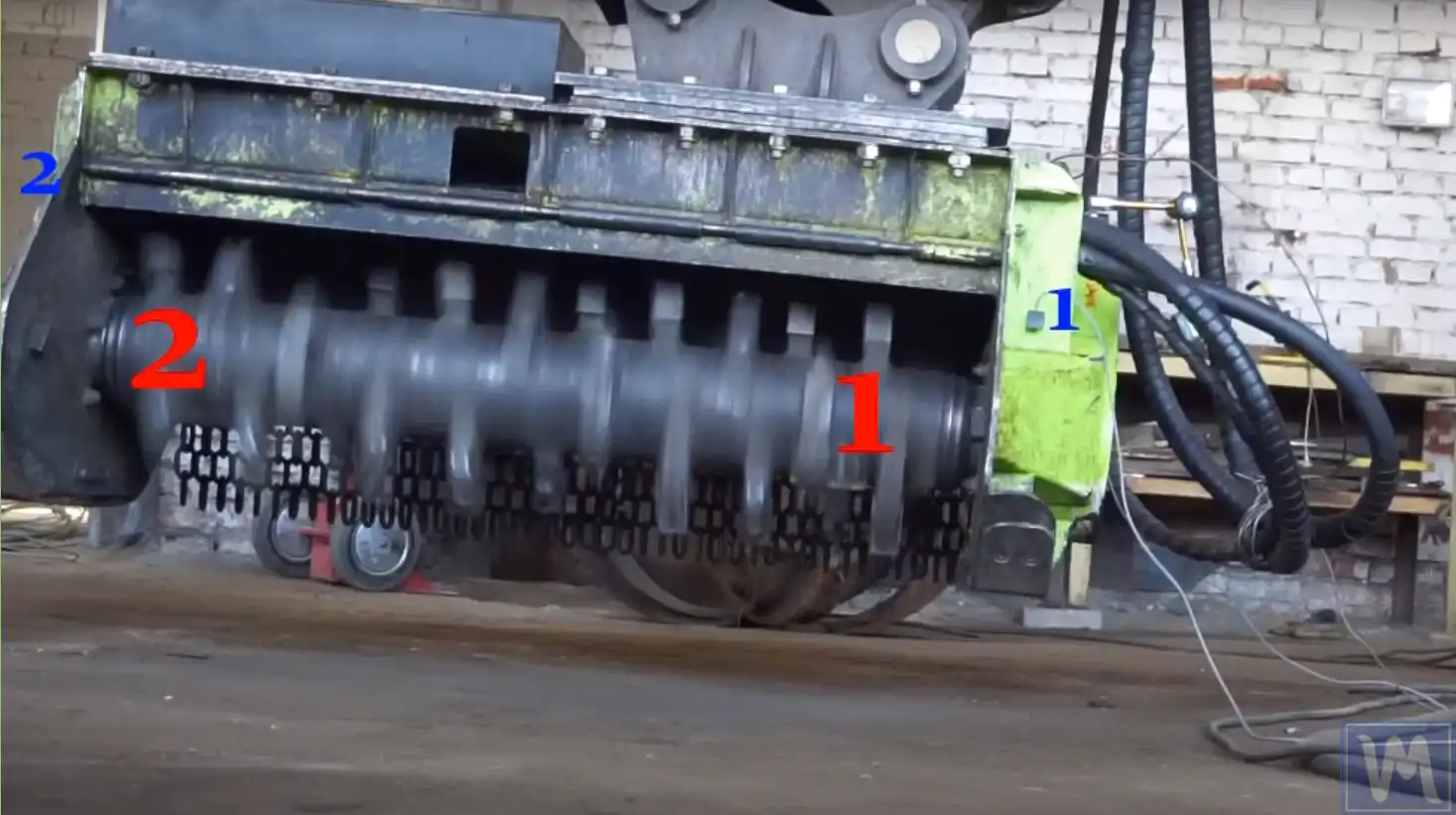
- দুই সংশোধন সমতল (সমতল 1 এবং সমতল 2) যেখানে সংশোধন ওজন স্থাপন করা হবে।
- দুটি কম্পন পরিমাপ বিন্দু (সাধারণত বিয়ারিং হাউজিং কাছাকাছি) দুটি চ্যানেলের সাথে সংযুক্ত।
- A ফেজ রেফারেন্স (টাকোমিটার + প্রতিফলক চিহ্ন) গতি এবং পর্যায় পরিমাপ করতে।
নিম্নে সাধারণ রোটর কনফিগারেশনের জন্য সংশোধন সমতল এবং সেন্সর স্থাপনা দেখায় এমন সাধারণ উদাহরণ রয়েছে।
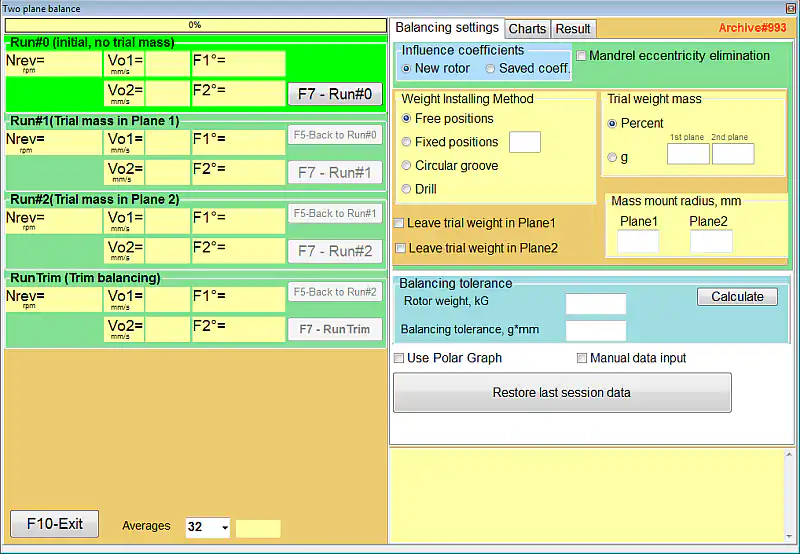
4. দ্বি-সমতল সন্তুলন পদ্ধতি
ক্ষেত্রে, দ্বি-সমতল সন্তুলন সাধারণত ব্যবহার করে সম্পাদিত হয় প্রভাব সহগ পদ্ধতি। সাধারণ ক্রম হল:
- রান #0: কোনো ট্রায়াল ওজন ছাড়াই ভিত্তি কম্পন (প্রশস্ততা এবং পর্যায়) পরিমাপ করুন।
- রান #1: একটি ইনস্টল করুন ট্রায়াল ওয়েট সমতল 1 এ, আবার কম্পন পরিমাপ করুন।
- রান #2: ট্রায়াল ওজন সমতল 2 এ সরান, আবার কম্পন পরিমাপ করুন।
- গণনা: সফটওয়্যার সমতল 1 এবং সমতল 2 এর জন্য সংশোধন ওজন গণনা করে।
- সংশোধন এবং যাচাইকরণ: ট্রায়াল ওজন অপসারণ করুন, সংশোধন ওজন স্থাপন করুন, এবং একটি যাচাইকরণ চালান (ট্রিম রান) ফলাফল নিশ্চিত করতে।
যখন একটি গণনা করা সংশোধন কোণ দুটি অ্যাক্সেসযোগ্য ফিক্সিং পয়েন্টের মধ্যে পড়ে, প্রয়োজনীয় ভর উপলব্ধ অবস্থানে একটি দুই-সংশোধন সমতল সংশোধন-ভর বিচ্ছেদ ক্যালকুলেটরদিয়ে সমাধান করা যায়, এবং অন্তর্নিহিত একক-সমতল সংবেদনশীলতা একটি দিয়ে পরীক্ষা করা যায় প্রভাব সহগ ক্যালকুলেটর.
5. Balanset-1A দিয়ে দ্বি-সমতল সন্তুলন
Balanset-1A ক্ষেত্র অবস্থার এবং উৎপাদন পরিবেশে একক-সমতল এবং দ্বি-সমতল রোটর সন্তুলনের জন্য ডিজাইন করা একটি দ্বৈত-চ্যানেল, পিসি-ভিত্তিক সন্তুলন সিস্টেম। দ্বি-সমতল মোডে, Balanset-1A রোটর গতি এবং 1x কম্পন (RMS এবং পর্যায়) দুটি চ্যানেলে পরিমাপ করে এবং উভয় সমতলের জন্য সংশোধন ওজন পরামিতি গণনা করে।
যেহেতু Balanset-1A সরাসরি ইনস্টল করা মেশিনে ব্যবহার করা হয়, এটি বাস্তব পরিচালনার শর্তাদির অধীনে সন্তুলন করে — সারিবদ্ধকরণ, বিয়ারিং প্রাক-লোড, এবং ভিত্তি প্রভাব সব অন্তর্ভুক্ত — এবং অর্জিত অবশিষ্ট ভারসাম্যহীনতা নির্বাচিত সহনশীলতার বিরুদ্ধে, যা একটি দিয়ে ক্রস-চেক করা যায় অবশিষ্ট ভারসাম্যহীনতা ক্যালকুলেটর (ISO 21940-11).
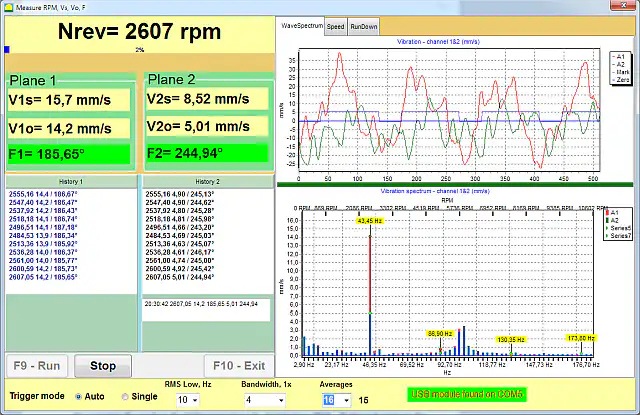
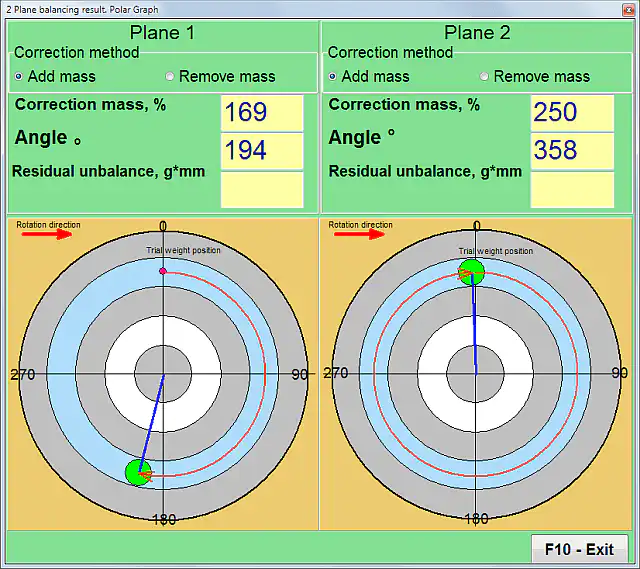
5.1 সফটওয়্যার: গতিশীল সন্তুলন সেটআপ এবং ফলাফল দৃশ্য
5.2 ভাইব্রোমিটার মোড (সন্তুলনের আগে দ্রুত পরীক্ষা)
সন্তুলনের আগে এবং সময়, ভাইব্রোমিটার মোড ব্যবহার করে কম্পন পর্যবেক্ষণ করতে এবং পরিমাপের জন্য স্থিতিশীল অপারেটিং অবস্থা নিশ্চিত করতে পারেন।