Dinaminis balansavimas (dviejų plokštumų balansavimas) paaiškinimas







1. Apibrėžimas: Kas yra dinaminis balansavimas?
Dinaminis balansavimas yra procedūra, skirta rotoriaus disbalansui ištaisyti atliekant masės korekcijas mažiausiai du atskiri lėktuvai išilgai jo ilgio. Jis naudojamas, kai nepakanka korekcijos vienoje plokštumoje, nes rotorius gali sujungti statinis (jėgos) disbalansas ir poros disbalansas.
2. Statinis ir dinaminis disbalansas: Esminis skirtumas: stabilumas ir stabilumas.
Norint suprasti dinaminį balansavimą, svarbu atskirti dvi pagrindines disbalanso formas.
- Statinis disbalansas: rotoriaus masės centras pasislinkęs nuo sukimosi ašies. Jis elgiasi kaip viena “sunkioji vieta” ir gali būti ištaisytas vienu svoriu vienoje plokštumoje.
- Dinaminis disbalansas: disbalansas pasiskirsto išilgai rotoriaus, todėl vienos plokštumos korekcijos nepakanka. Tokia būklė aptinkama sukantis ir reikalauja korekcijų dviejose skirtingose plokštumose. Taip atsitinka, kai rotorius turi dvi vienodas sunkias vietas priešinguose galuose, išdėstytas 180° atstumu viena nuo kitos. Tokia būklė yra statiškai subalansuota (kai rotorius yra ramybės būsenoje, jis nesvyruoja į sunkiąją vietą), tačiau kai jis sukasi, dvi sunkiosios vietos sukuria sukimosi jėgą, arba "porą", dėl kurios rotorius svyruoja galu į viršų. Poros disbalansą galima aptikti tik tada, kai rotorius sukasi, ir jį galima ištaisyti tik dedant svorius dviejose skirtingose plokštumose, kad būtų sukurta priešinga pora.


3. Korekcijos plokštumos ir jutiklių išdėstymas
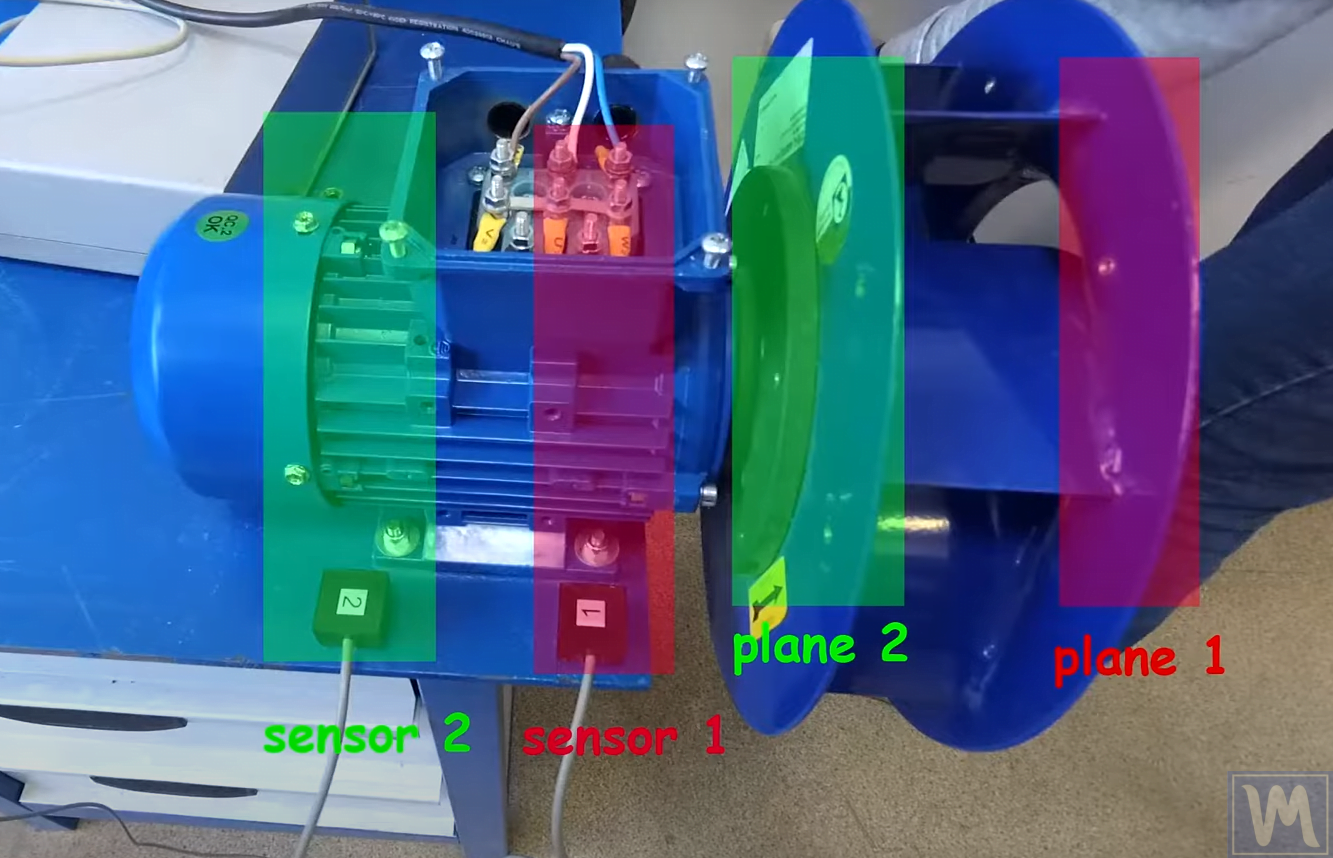
Dviejų plokštumų balansavimas grindžiamas trimis dalykais:
- Dvi korekcijos plokštumos (1 plokštuma ir 2 plokštuma), kuriose bus įrengti korekciniai svoriai.
- Du vibracijos matavimo taškai (paprastai prie guolių korpusų), prijungtų prie dviejų kanalų.
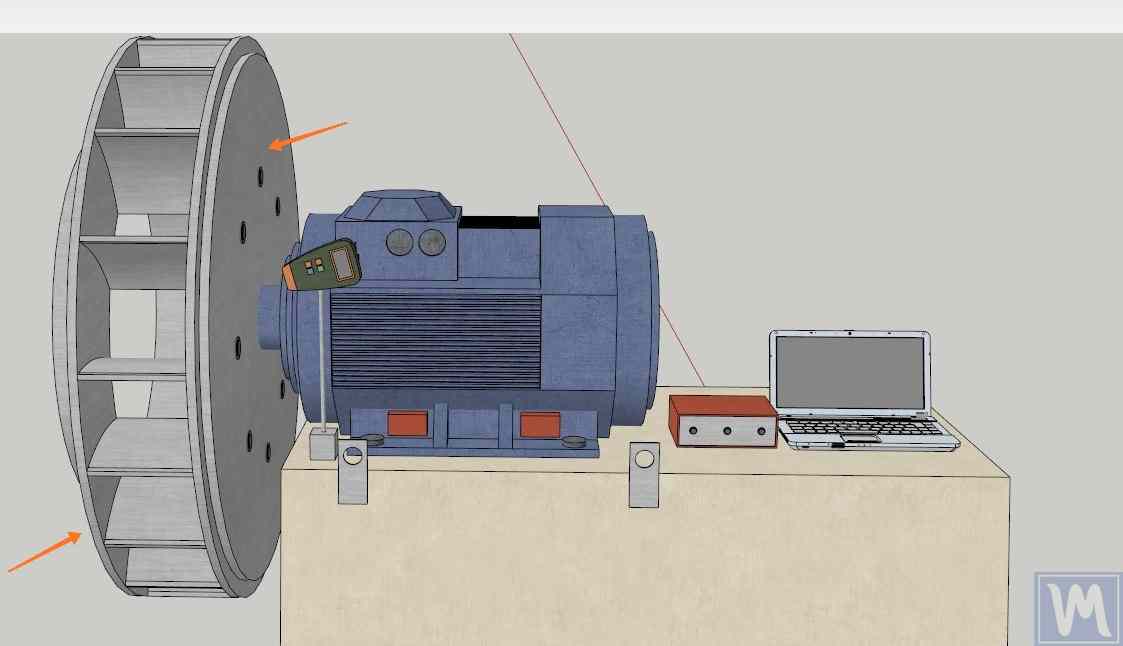
- Fazės nuoroda (tachometras + atspindžio ženklas) greičiui ir fazei matuoti.
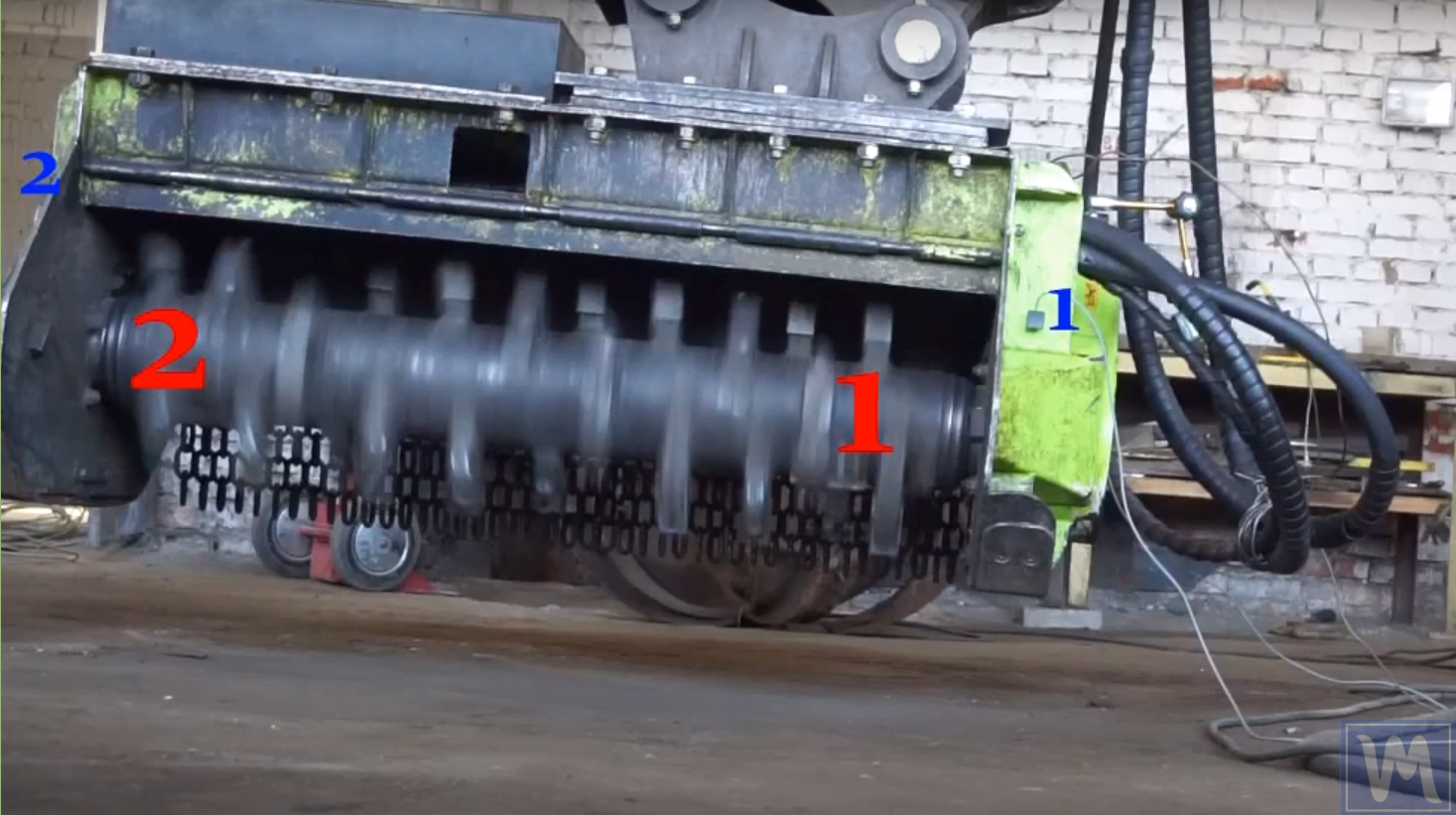
Toliau pateikiami tipiniai pavyzdžiai, rodantys įprastų rotorių konfigūracijų korekcijos plokštumas ir jutiklių išdėstymą.

4. Dviejų plokštumų balansavimo procedūra
Šioje srityje dviejų plokštumų balansavimas paprastai atliekamas taikant įtakos koeficiento metodą. Įprastinė seka yra tokia:
- Vykdykite #0: išmatuoti bazinę vibraciją (amplitudę ir fazę) be bandomųjų svorių.
- Vykdykite #1: 1 plokštumoje sumontuokite bandomąjį svorį ir vėl išmatuokite vibraciją.
- Vykdykite #2: perkelkite bandomąjį svorį į 2 plokštumą ir vėl išmatuokite vibraciją.
- Skaičiavimas: programinė įranga apskaičiuoja 1 ir 2 plokštumos korekcinius svorius.
- Taisymas ir tikrinimas: nuimkite bandomąjį svorį, sumontuokite korekcinius svorius ir atlikite patikros važiavimą (trimito važiavimą), kad patvirtintumėte rezultatą.
5. Dviejų plokštumų balansavimas naudojant "Balanset-1A
Balanset-1A tai dviejų kanalų, kompiuteriu veikianti balansavimo sistema, skirta vienos ir dviejų plokštumų rotoriams balansuoti lauko sąlygomis ir gamybos aplinkoje. Dviejų plokštumų režimu "Balanset-1A" matuoja rotoriaus greitį ir vektorių. 1x vibracija (RMS ir fazė) dviem kanalais ir apskaičiuoja abiejų plokštumų korekcinio svorio parametrus.
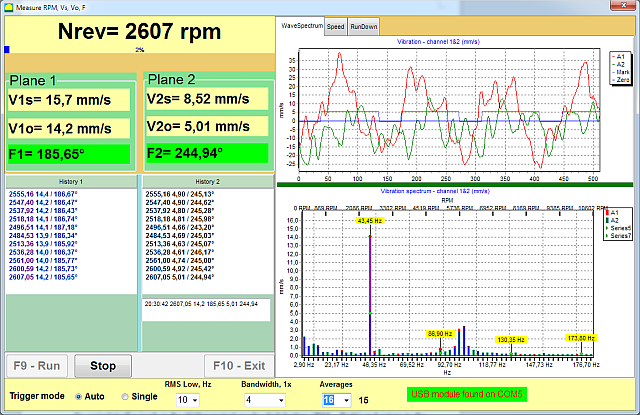
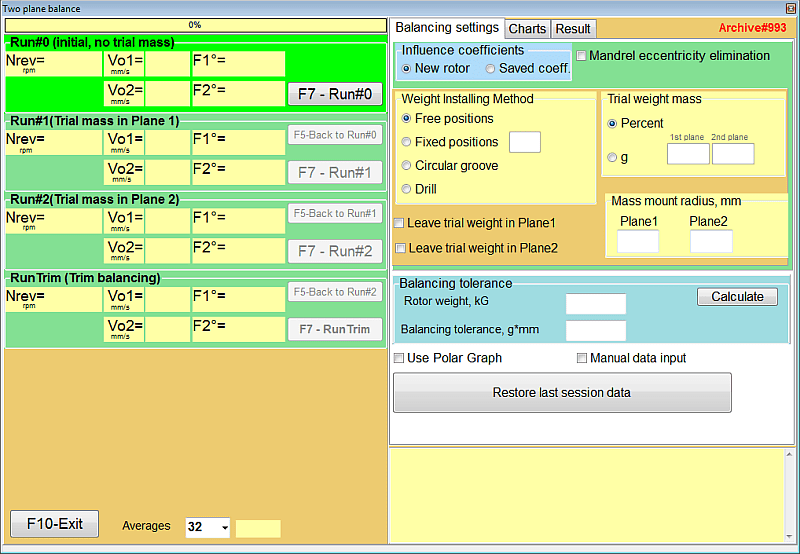
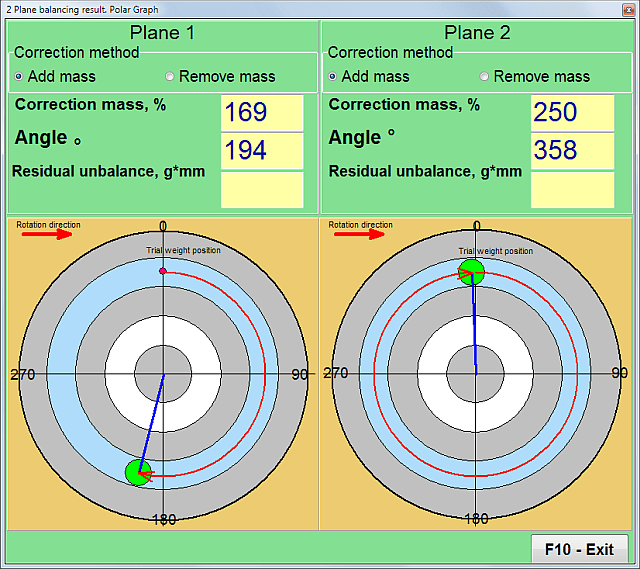
5.1 Programinė įranga: dinaminio balansavimo sąranka ir rezultatų peržiūra
5.2 Vibrometro režimas (greitas patikrinimas prieš balansavimą)
Prieš balansavimą ir balansavimo metu vibrometro režimu galima stebėti vibraciją ir įsitikinti, kad matavimo sąlygos yra stabilios.