Dinamik Balanslaşdırma (İki Təyyarədə Balanslaşdırma) İzah edildi







1. Tərif: Dinamik balanslaşdırma nədir?
Dinamik balanslaşdırma rotorda düzəltmə kütləsi tətbiq etməklə düzəltmə prosedurdur balanssızlıq bütövlükdə minimum daxilində iki ayrı təyyarə Uzunluğu boyunca. Bu, bir müstəvidə düzəlişin kifayət etmədiyi hallarda istifadə olunur, çünki rotor birləşə bilər Statik (məcburi) balanssızlıq and cüt balanssızlığı.
2. Statik və Dinamik Dengesizlik: Əsas Fərq
Dinamik balanslaşdırmanı başa düşmək üçün iki əsas balanssızlıq formasını bir-birindən fərqləndirmək vacibdir.
- Statik balanssızlıq: Rotorun kütlə mərkəzi fırlanma oxundan kənarda yerləşir. O, tək bir “ağır nöqtə” kimi davranır və bir təyyarədə bir ağırlıqla düzəldilə bilər.statik balanslaşdırma, həmçinin tək müstəvi balanslaşdırma).
- Dinamik balanssızlıq: Dengesizlik rotor boyunca paylaşıldığı üçün bir müstəvidə düzəliş kifayət etmir. Bu vəziyyət fırlanma zamanı aşkarlanır və iki fərqli müstəvidə düzəliş tələb edir. Bu, rotorun əks uclarında, bir-birindən 180° bucaqla yerləşən iki eyni ağır nöqtəyə malik olduğu zaman baş verir. Bu vəziyyət statik baxımdan balanslaşdırılıb (dayanmış vəziyyətdə ağır nöqtəyə doğru fırlanmayacaq), lakin fırlandıqda iki ağır nöqtə fırlanma qüvvəsi, yəni "moment" yaradır və rotorun ucdan-uca sallanmasına səbəb olur. Momentli balanssızlıq yalnız rotor fırlanarkən aşkarlana bilər və yalnız iki fərqli müstəvidə çəkilər yerləşdirərək əks moment yaradılmaqla düzəldilə bilər.
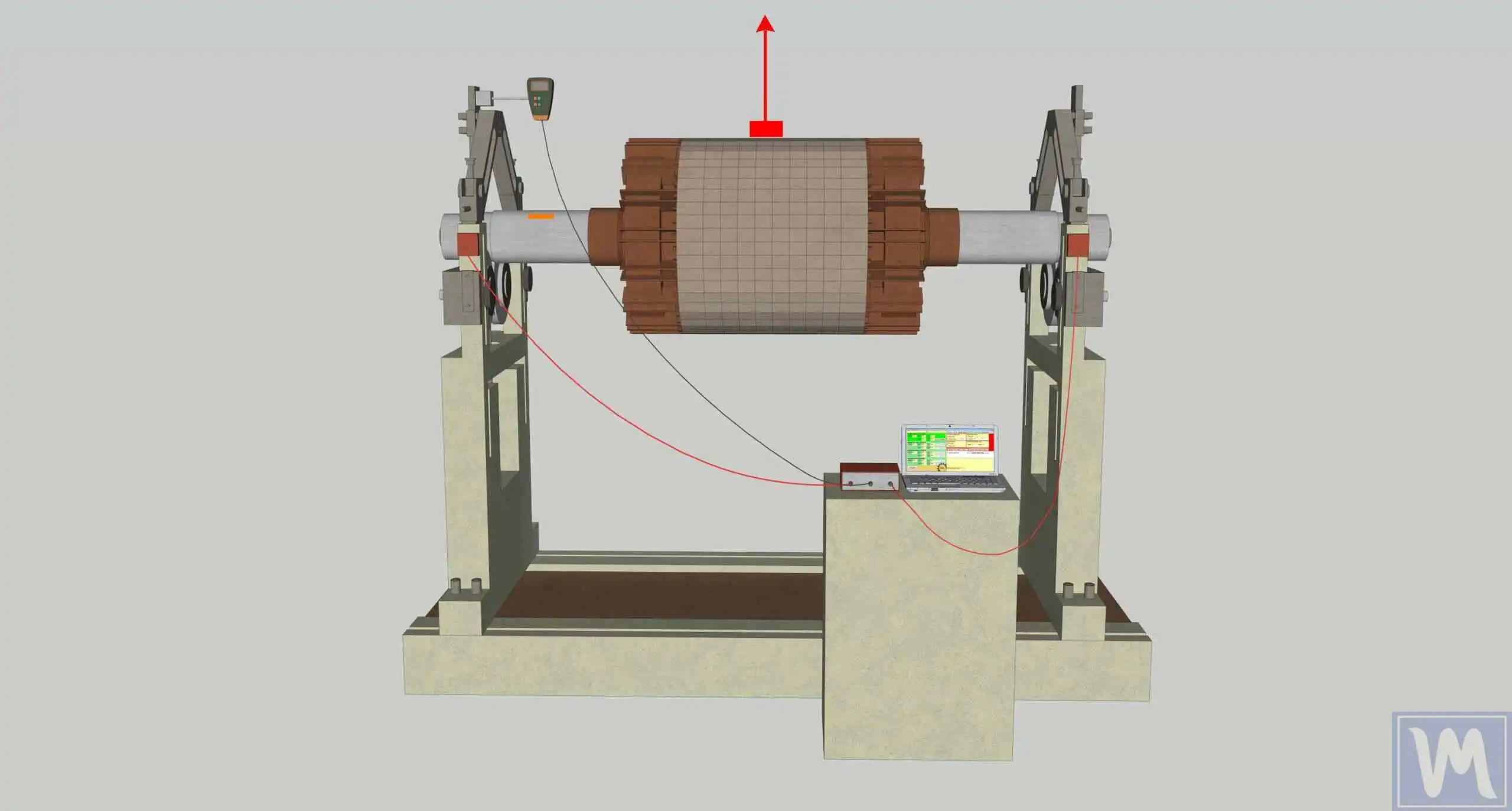
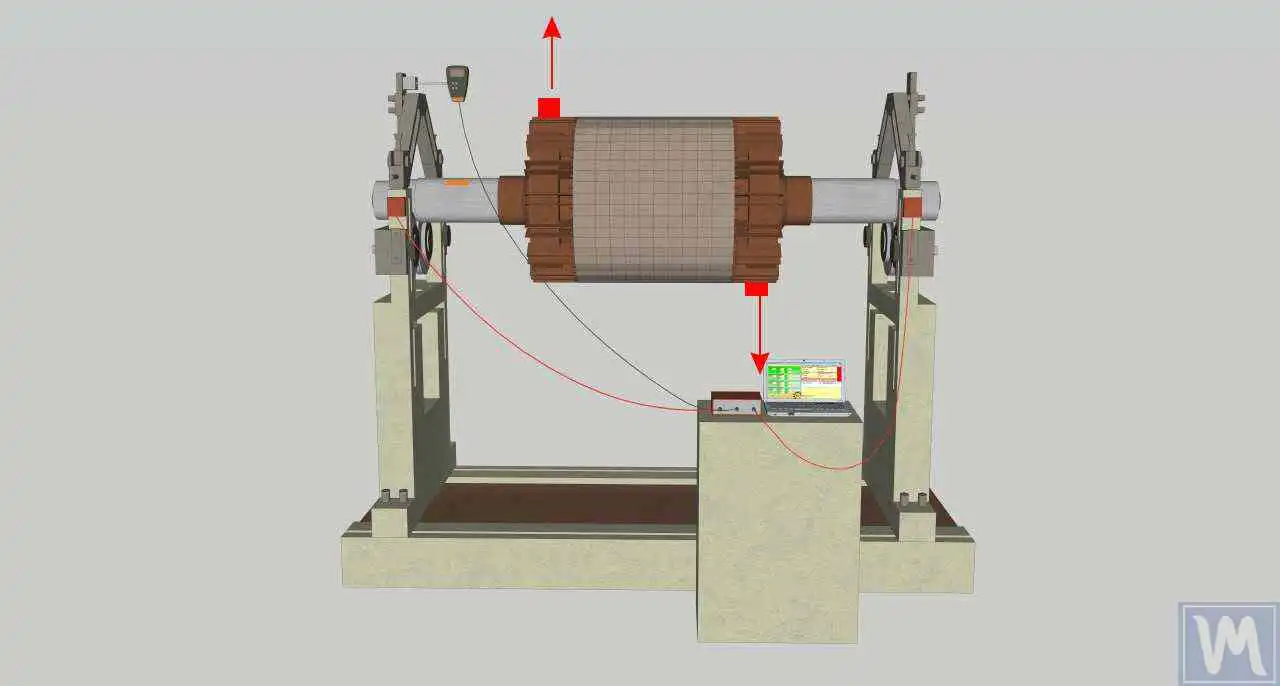
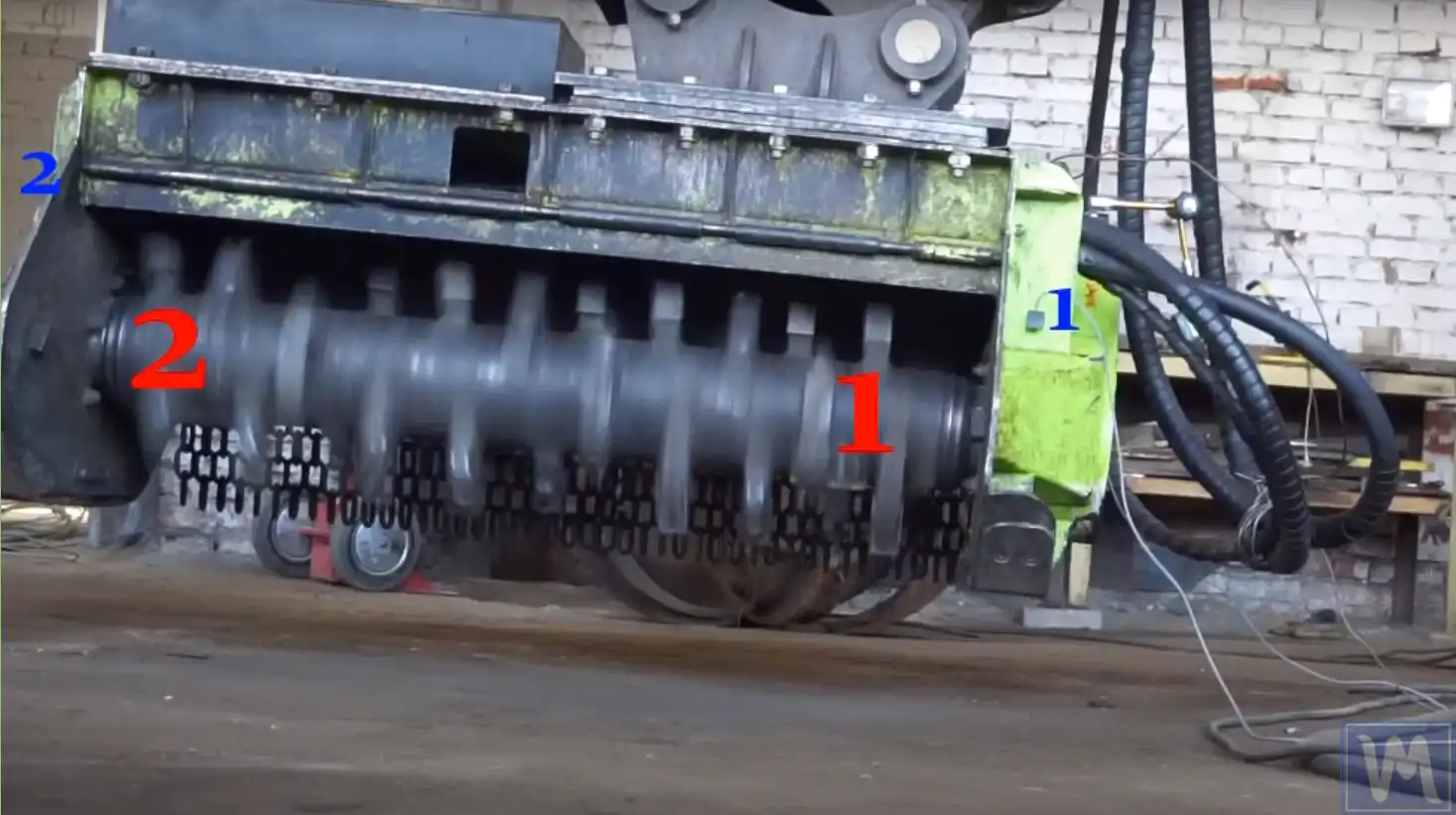
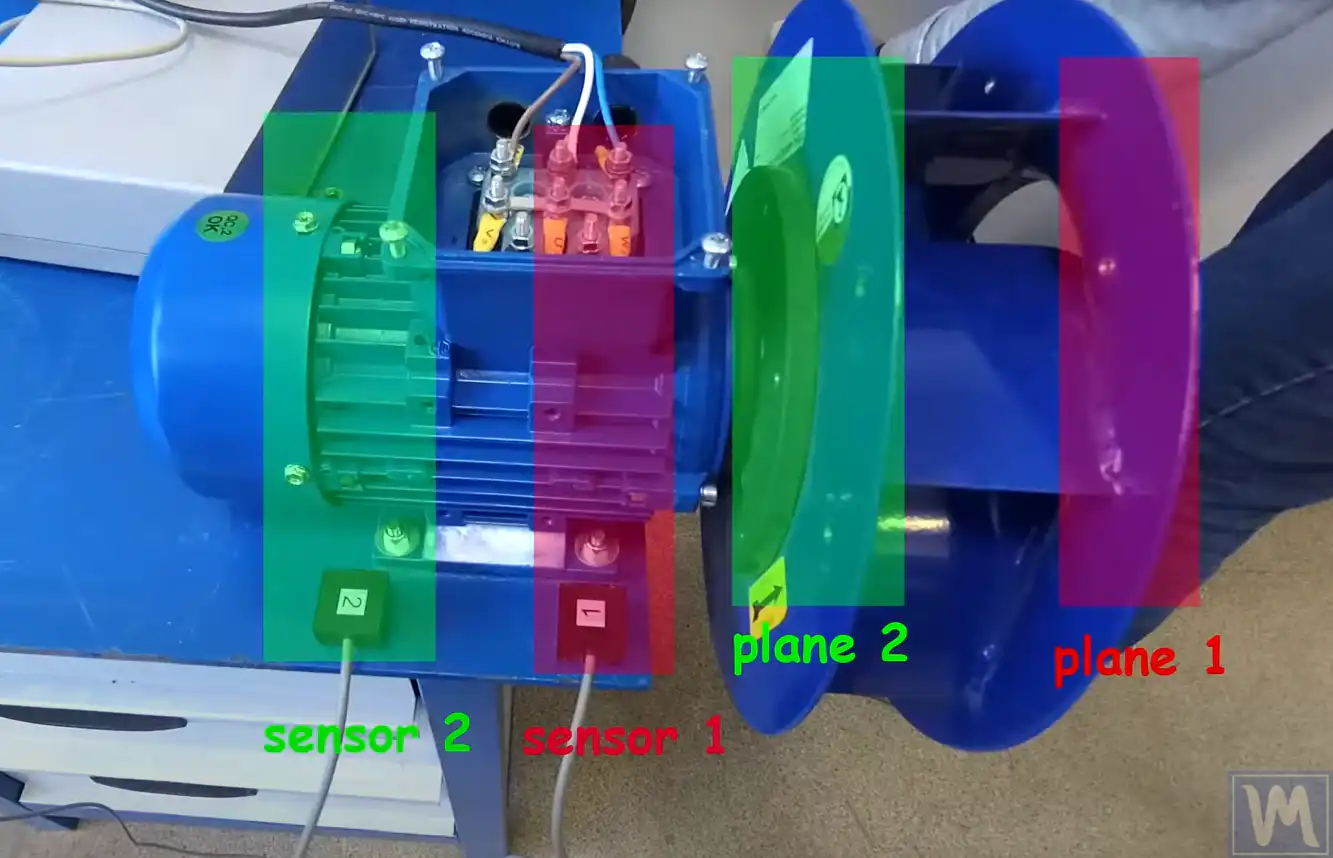
3. Düzəliş müstəviləri və sensor yerləşdirilməsi
İki müstəvi balanslaşdırma üç şeydən ibarətdir:
- Two düzəliş təyyarələri (Plana 1 və Plana 2) düzəliş çəkilərinin quraşdırılacağı yerlər.
- İki titrəmə ölçmə nöqtəsi (adətən rulman korpuslarının yaxınlığında) iki kanala qoşulmuş.
- A faza istinad (taxometr + Eksplikativ işarə) sürət və faza ölçmək üçün.
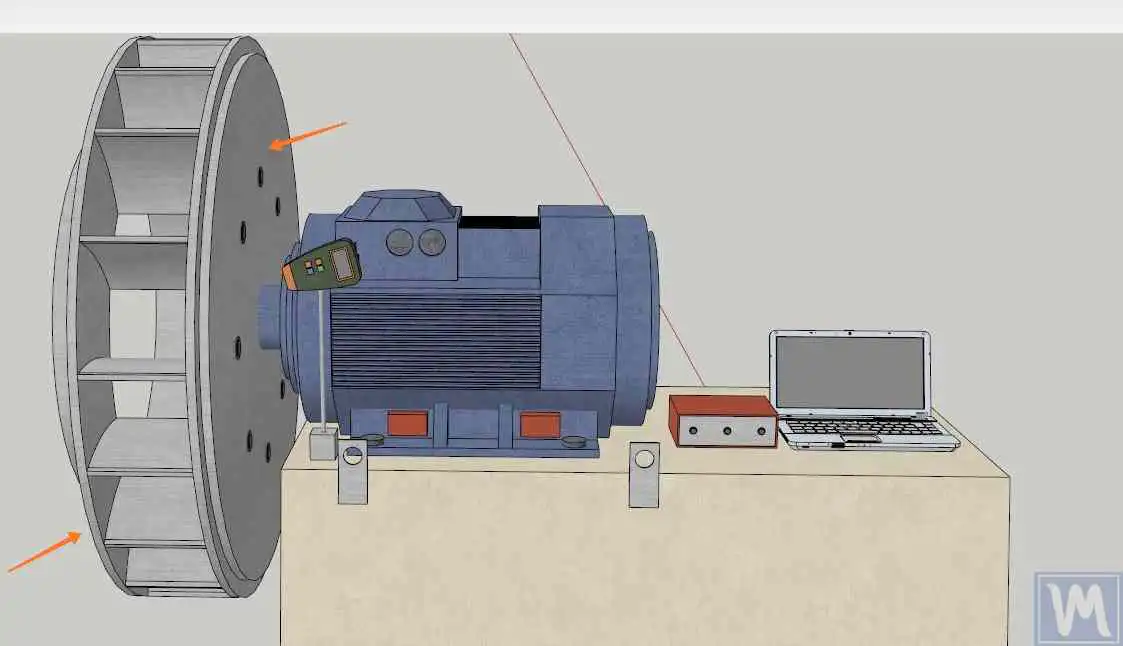
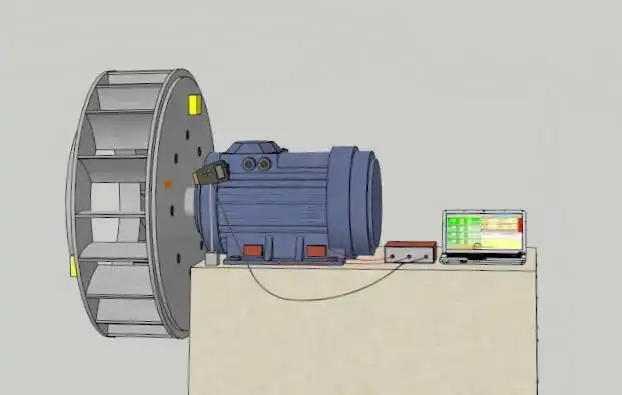
Aşağıda ümumi rotor konfiqurasiyaları üçün düzəliş müstəvilərini və sensor yerləşdirilməsini göstərən tipik nümunələr verilmişdir.
4. İki-səviyyəli balanslaşdırma proseduru
Sahədə iki müstəvi balanslaşdırma adətən təsir əmsalı üsuluistifadə edərək həyata keçirilir. Tipik ardıcıllıq:
- #0 işə salın: Sınaq ağırlıqları olmadan baza titrəməsini (amplitudu və fazanı) ölçün.
- #1-i işə salın: quraşdırın sınaq çəkisi Müstəvi 1-də, vibrasiyonu yenidən ölçün.
- #2-ni işə salın: Sınaq çəkisini 2-ci müstəviyə köçürün, titrəməni yenidən ölçün.
- Hesablama: Proqram təminatı 1-ci təyyarə və 2-ci təyyarə üçün düzəliş çəkilərini hesablayır.
- Düzəliş və yoxlama: sınaq kütləsini çıxarın, düzəltmə kütlələrini quraşdırın və təsdiqləmə qaçışı (kəsim qaçışı) nəticəni təsdiq etmək üçün həyata keçirin.
Hesablanmış düzəltmə bucağı iki əlçatan bağlama nöqtəsi arasına düşsə, tələb olunan kütlə iki müstəvi düzəltmə kütləsinin parçalanması kalkulyatoruistifadə edərək mövcud mövqelərə həll edilə bilər və əsas tək müstəvi həssaslığı təsir əmsalı kalkulyatoru.
5. Balanset-1A ilə iki müstəvi balanslaşdırma
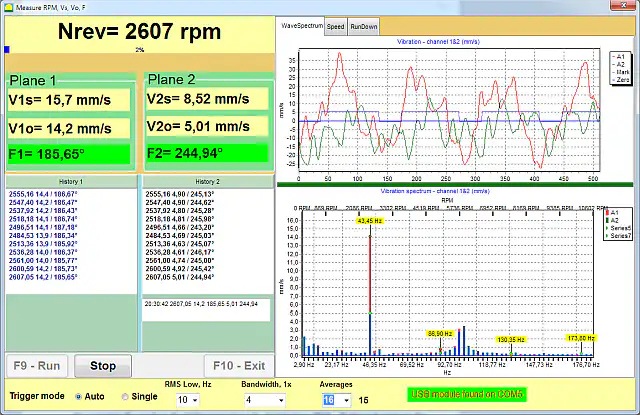
Balanset-1A Sahə şəraitində və istehsalat mühitində tək-səviyyəli və iki-səviyyəli rotorların balanslaşdırılması üçün nəzərdə tutulmuş, PC-əsaslı iki kanallı balanslaşdırma sistemidir. İki-səviyyəli rejimdə Balanset-1A rotorun sürətini və vektorunu ölçür. 1x titrəmə (RMS və faza) iki kanalda hesablanır və hər iki müstəvi üçün düzəliş çəki parametrlərini hesablayır.
Çünki Balanset-1A quraşdırılmış maşında birbaşa istifadə edilərsə, həqiqi işçi şəraitində balanslanır — uyğunlaşma, rulman öncə yüklənməsi və təməl təsirləri daxil olmaqla — və əldə edilən qalıq balanssızlıq seçilmiş toleransa qarşı hesabat verir, bunu Qalıq dengesizlik kalkulyatoru (ISO 21940-11).
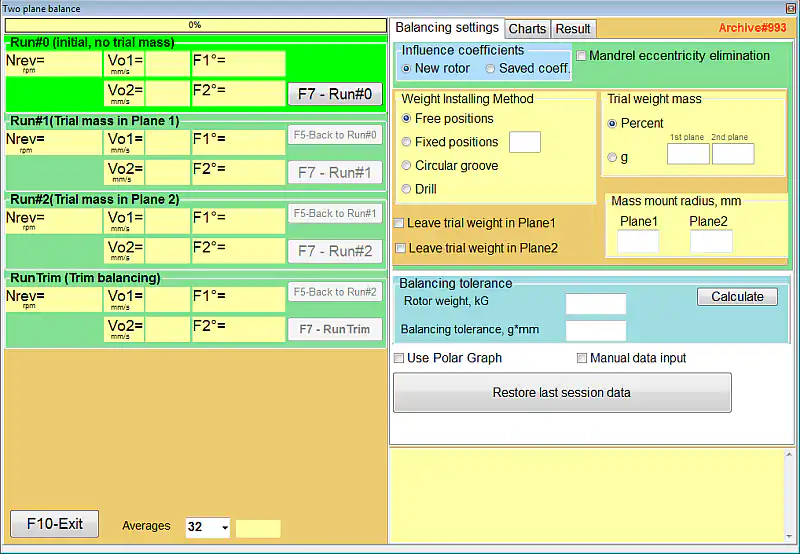
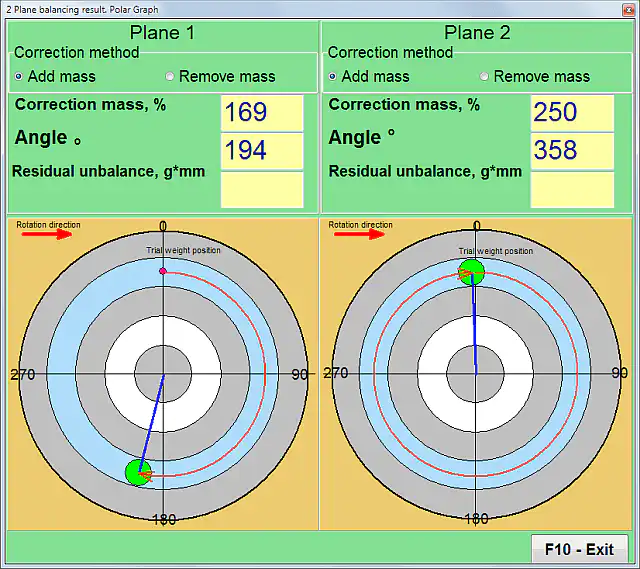
5.1 Proqram təminatı: dinamik balanslaşdırma tənzimləməsi və nəticələrin nümayişi
5.2 Vibrometr rejimi (balanslaşdırmadan əvvəl sürətli yoxlama)
Balanslaşdırmadan əvvəl və zamanı, Vibrometr rejimi vibrasiyonu izləmək və ölçümlər üçün sabit işçi şəraitini təsdiq etmək üçün istifadə edilə bilər.