დინამიური ბალანსირების (ორსიბრტყიანი ბალანსირების) ახსნა







1. განმარტება: რა არის დინამიკური დაბალანსება?
დინამიური დაბალანსება არის პროცედურა დისბალანსი რეტორში, ნაჭუჭი უმცროსი სიღრმეს ერთ მხრივ მიმდებარე მასის ორი ცალკეული სიბრტყე მის სიგრძეზე. ის გამოიყენება მაშინ, როდესაც ერთ სიბრტყეში კორექცია საკმარისი არ არის, რადგან როტორი შეიძლება აერთიანებდეს სტატიკური (ძალოვანი) დისბალანსი and წყვილის დისბალანსი.
2. სტატიკური და დინამიკური დისბალანსი: მთავარი განსხვავება
დინამიკური დაბალანსების გასაგებად, მნიშვნელოვანია არათანაბრობის ორი ძირითადი ფორმის გარჩევა.
- სტატიკური დისბალანსი: როტორის მასის ცენტრი გადახრილია მისი ბრუნვის ღერძიდან. ის ერთიან “მძიმე წერტილს” ჰგავს და მისი კორექტირება შესაძლებელია ერთი წონით, ერთ სიბრტყეში.სტატიკური დაბალანსება, also called ერთსიბრტყიანი ბალანსირება).
- დინამიური დისბალანსი: არათანაბარი მასა განაწილებულია როტორის გასწვრივ ისე, რომ ერთი სიბრტყის კორექცია საკმარისი არ არის. ეს მდგომარეობა ვლინდება როტაციისას და მოითხოვს კორექციებს ორ სხვადასხვა სიბრტყეში. ეს ხდება მაშინ, როდესაც როტორს აქვს ორი თანაბარი მძიმე წერტილი საპირისპირო ბოლოებში, რომლებიც 180°-ით არიან დაშორებული. ეს მდგომარეობა სტატიკურად დაბალანსებულია (მოსვენებისას მას მძიმე წერტილისკენ არ გადაეწევა), მაგრამ როდესაც ის ბრუნავს, ორი მძიმე წერტილი ქმნის მბრუნავ ძალას, ანუ "მომენტს", რომელიც როტორს თავიდან ფეხებამდე რხევას იწვევს. მომენტური არაბალანსი *მხოლოდ* შეიძლება გამოვლინდეს როტორის ბრუნვისას და *მხოლოდ* შეიძლება გამოსწორდეს ორ სხვადასხვა სიბრტყეში წონების განთავსებით საპირისპირო მომენტის შესაქმნელად.
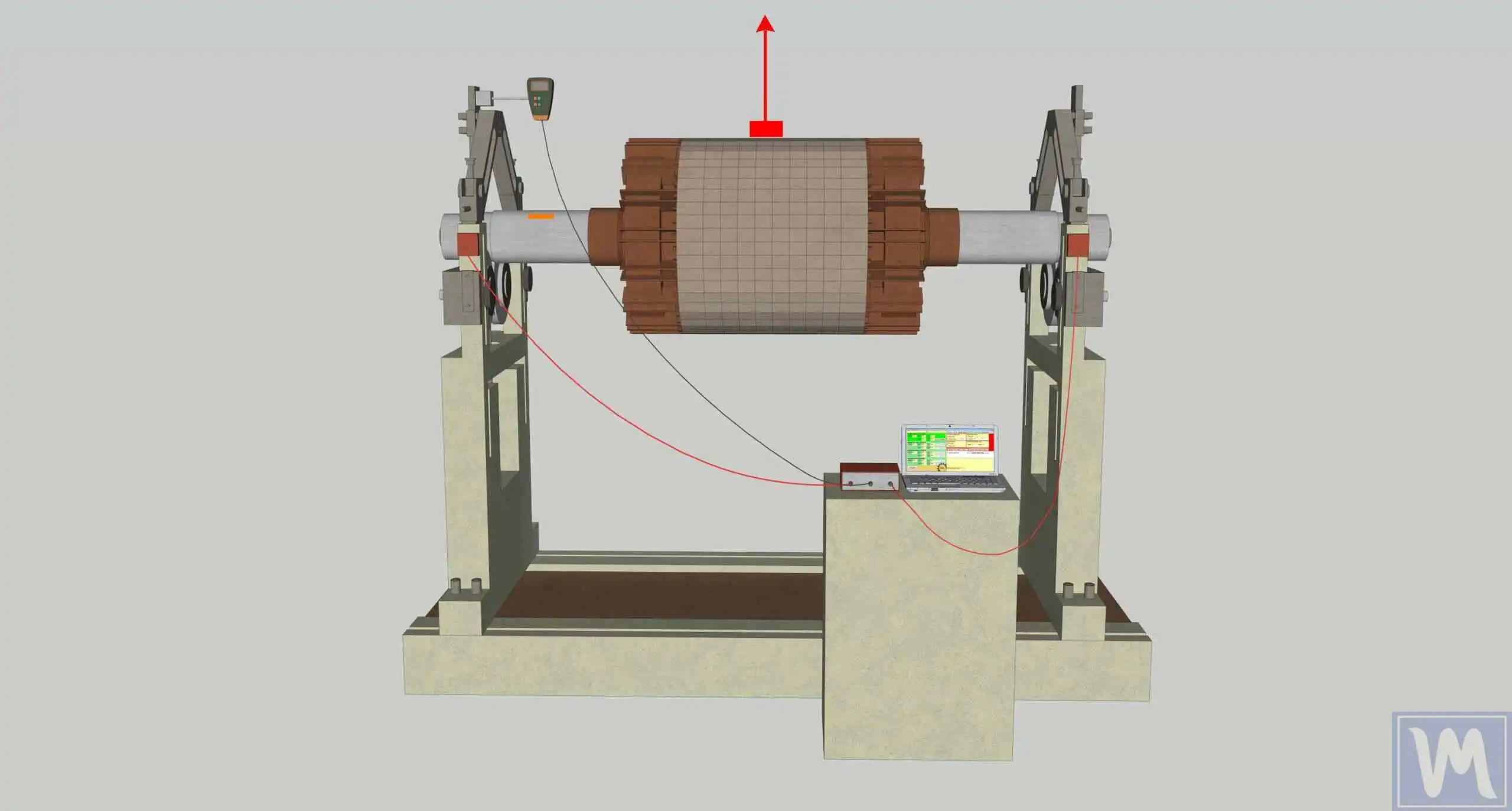
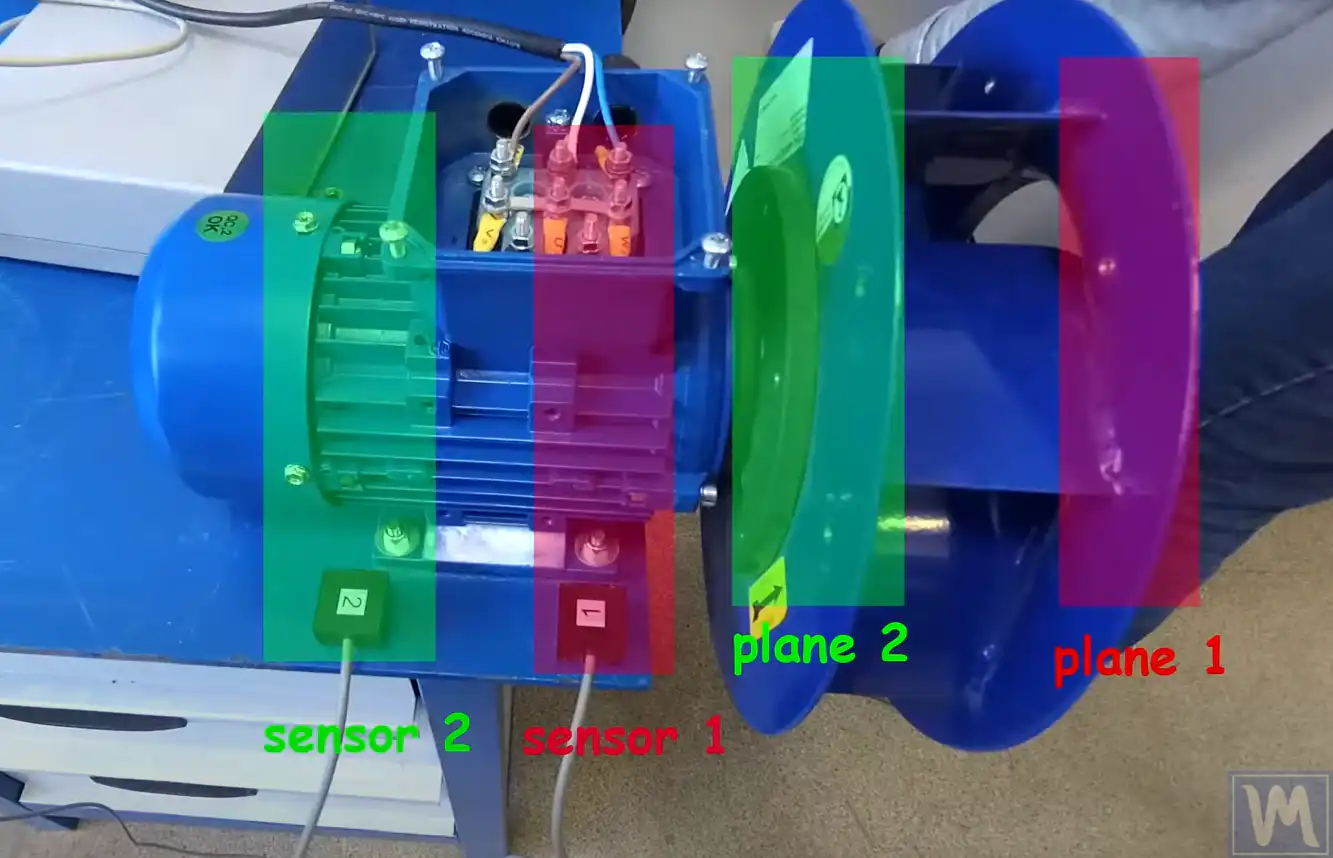
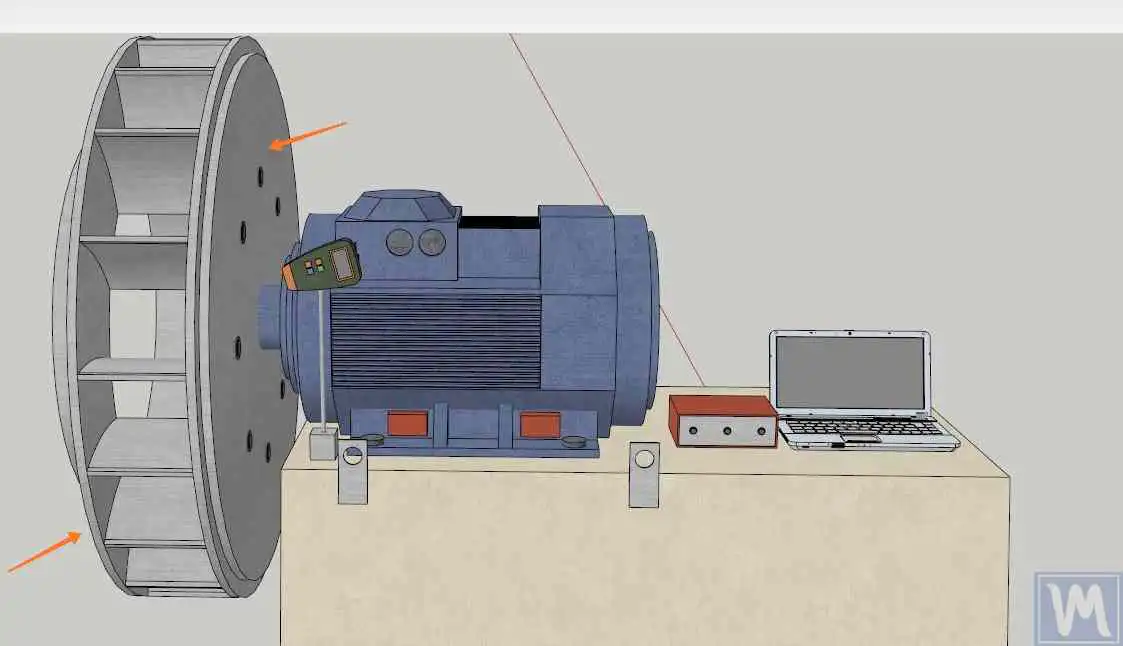
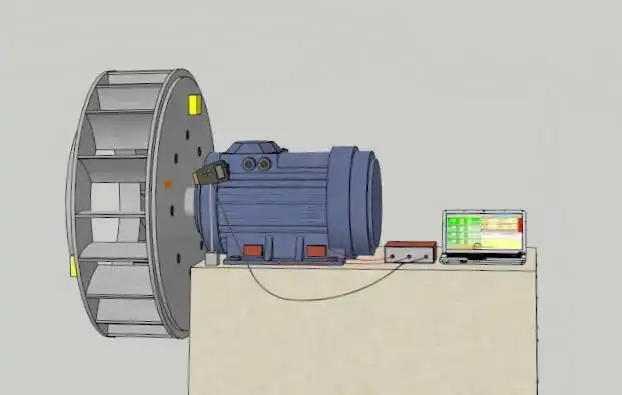
3. კორექციის ზედაპირები და სენსორების განლაგება
ორსიბრტყიანი ბალანსირება დაფუძნებულია სამ რამეზე:
- ორი კორექციის სიბრტყეები (სიბრტყე 1 და სიბრტყე 2), სადაც დამონტაჟდება საკორექციო წონები.
- ვიბრაციის გაზომვის ორი წერტილი (როგორც წესი, საკისრების კორპუსებთან) დაკავშირებულია ორ არხთან.
- ა ფაზა reference (ტაქომეტრი + ამრეკლი ნიშანი) სიჩქარის და ფაზის გასაზომად.
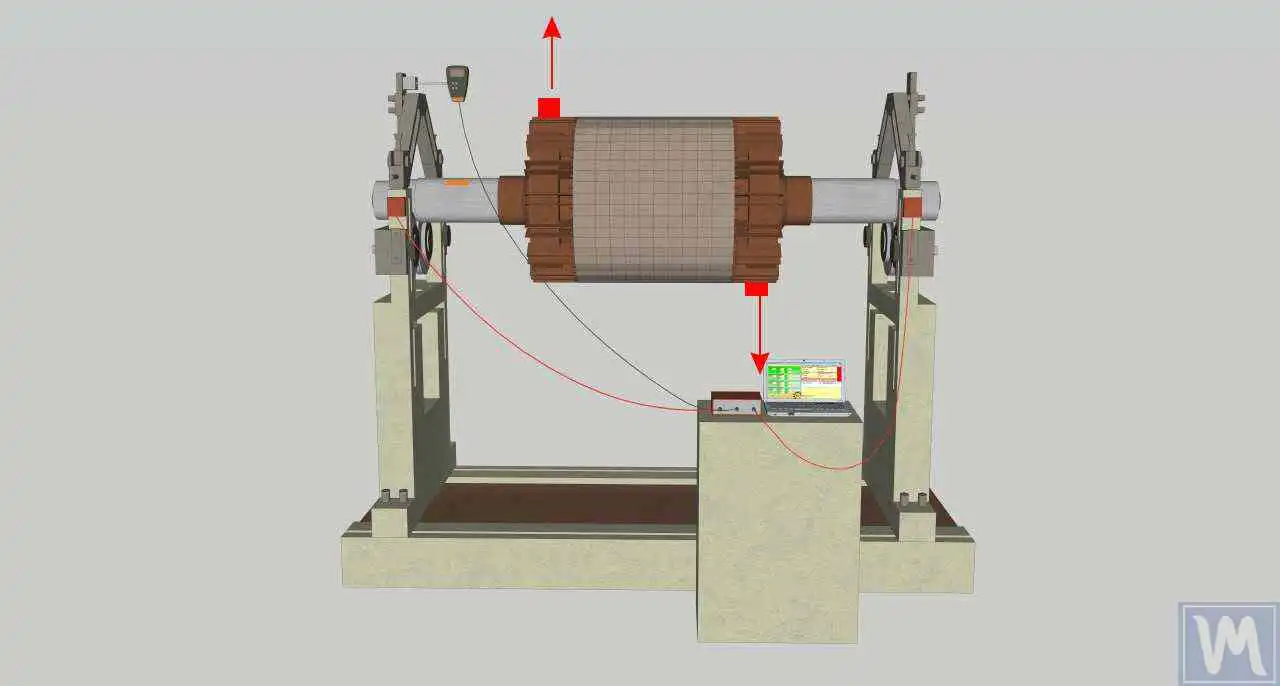
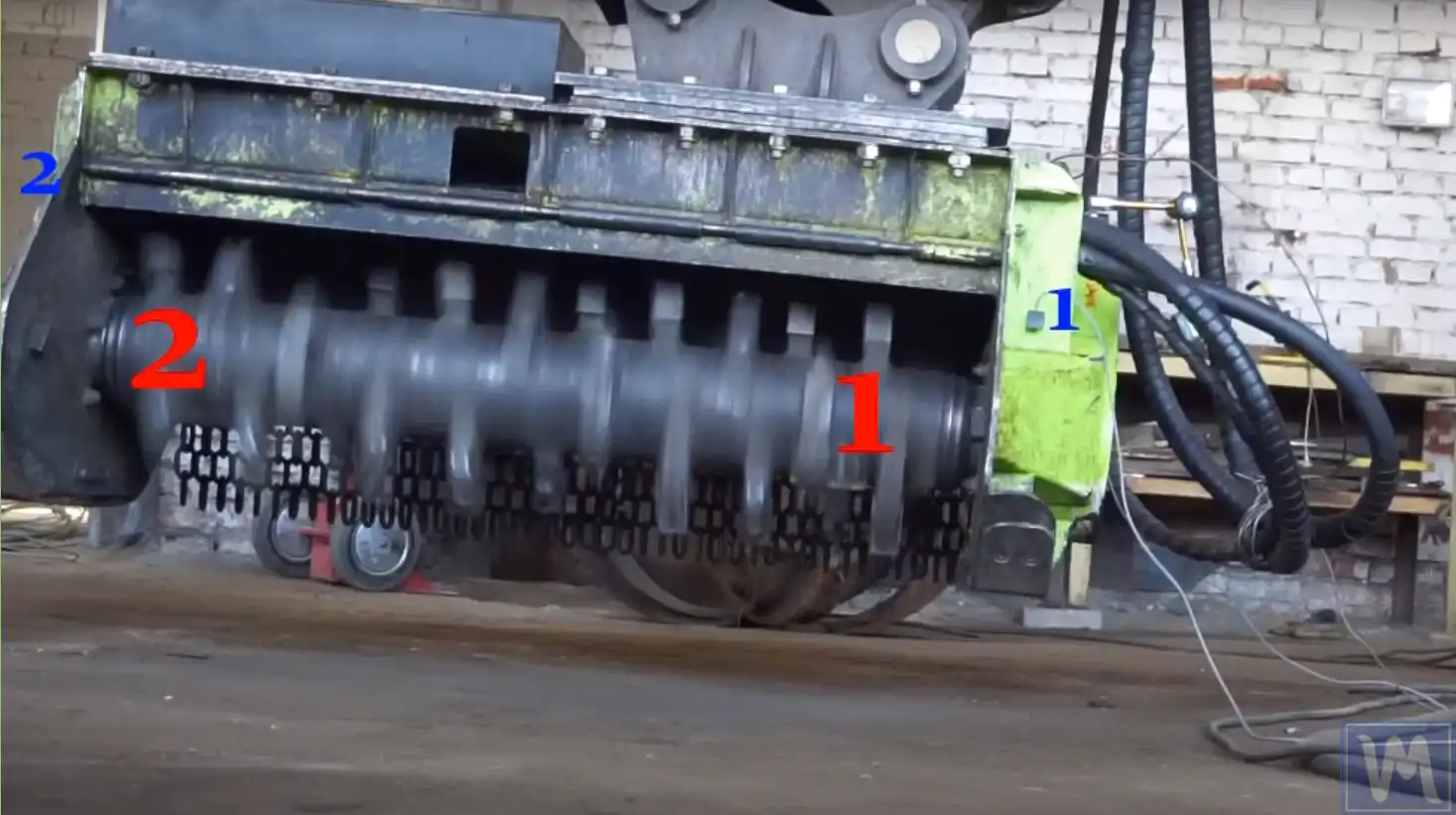
ქვემოთ მოცემულია ტიპური მაგალითები, რომლებიც აჩვენებს კორექციის სიბრტყეებსა და სენსორების განლაგებას როტორის გავრცელებული კონფიგურაციებისთვის.
4. ორპლანიანი დაბალანსების პროცედურა
მინდობილ, ორი-სიბრტყე ბალანსირება ჩვეულებრივ ხორციელდება გამოყენებით გავლენის კოეფიციენტის მეთოდი. დამახასიათებელი მიმდევრობა ხდება:
- გაშვება #0: საბაზისო ვიბრაციის (ამპლიტუდა და ფაზა) გაზომვა საცდელი წონების გარეშე.
- გაშვება #1: install a საცდელი წონა სიბრტყე 1-ში, კვლავ გაზომეთ ვიბრაცია.
- გაშვება #2: გადაიტანეთ საცდელი წონა სიბრტყე 2-ზე და ხელახლა გაზომეთ ვიბრაცია.
- გაანგარიშება: პროგრამული უზრუნველყოფა ითვლის კორექციის წონებს პირველი და მეორე სიბრტყისთვის.
- შესწორება და გადამოწმება: ამოიღოთ საცდელი წონა, დააყენეთ კორექციის წონები, და ჩაატარეთ დადასტურება (სიტყვით "დამადასტურებელი გაშვება") შედეგის დასაკმაყოფილებლად.
როდესაც გამოთვლილი კორექციის კუთხე ორ ხელმისაწვდომ დამაგრების წერტილს შორის ხვდება, საჭირო მასა შეიძლება გაწყდეს ხელმისაწვდომ პოზიციებზე გამოყენებით ორი-სიბრტყე კორექციის მასის გაშლების კალკულატორი, და საფუძველი ერთი-სიბრტყე მგრძნობიარობა შეიძლება შემოწმდეს გავლენის კოეფიციენტის კალკულატორი.
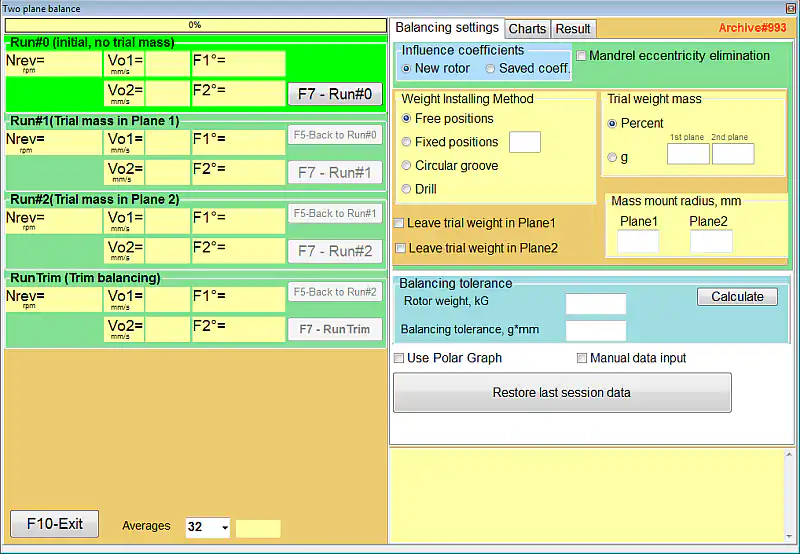
5. ორპლანიანი დაბალანსება Balanset-1A-თი
ბალანსეტი-1ა არის ორარხიანი, PC-ზე დაფუძნებული დაბალანსების სისტემა, რომელიც განკუთვნილია ერთსიბრტყიანი და ორსიბრტყიანი როტორის დაბალანსებისთვის საველე პირობებსა და საწარმოო გარემოში. ორსიბრტყიან რეჟიმში Balanset-1A ზომავს როტორის სიჩქარეს და ვექტორს 1x ვიბრაცია (RMS და ფაზა) ორ არხზე და ითვლის კორექციის წონის პარამეტრებს ორივე სიბრტყისთვის.
Because the ბალანსეტი-1ა გამოიყენება პირდაპირ დაყენებულ აპარატზე, ის ბალანსირებს რეალური მუშაობის პირობებში — გასწორება, ტარების წინ დატვირთვა, და საფუძველი ეფექტები ყველა ჩათვლით — და ატყობინებს მიღწეულ ნარჩენი დისბალანსი შერჩეული ტოლერანტობის წინააღმდეგ, რომელიც შეიძლება შეფასდეს ნარჩენი დისბალანსის კალკულატორი (ISO 21940-11).
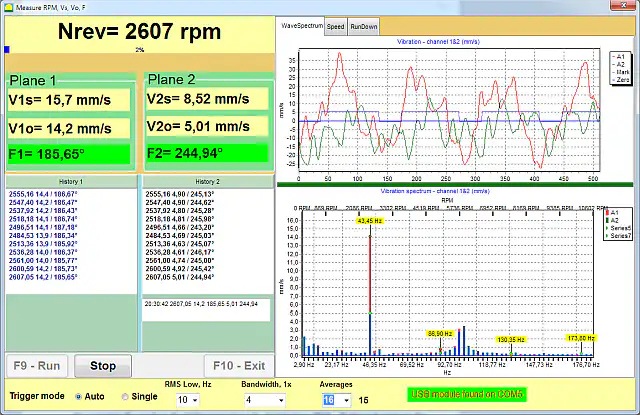
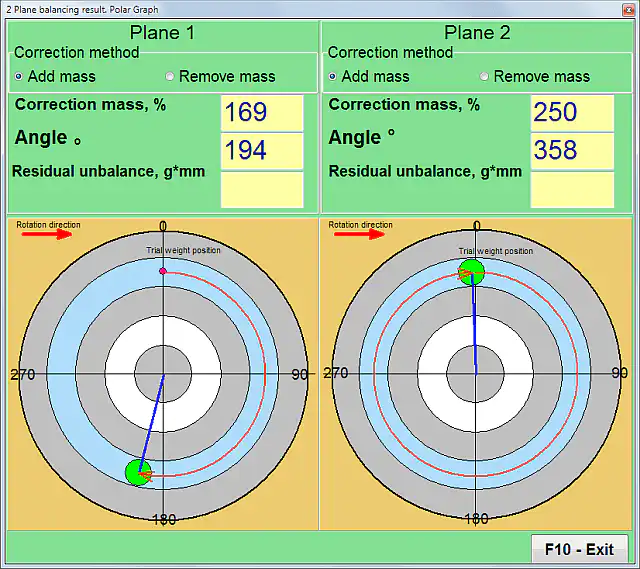
5.1 პროგრამული უზრუნველყოფა: დინამიკური დაბალანსების პარამეტრების დაყენება და შედეგების ნახვა
5.2 ვიბრომეტრის რეჟიმი (სწრაფი შემოწმება დაბალანსებამდე)
ბალანსირებამდე და მის დროს, ვიბრომეტრი რეჟიმი შეიძლება გამოყენებული იყოს ვიბრაციის მონიტორინგისა და სტაბილური მუშაობის პირობების მოწმობისათვის გაზომვებისთვის.