Dynaaminen tasapainotus (kaksitasoinen tasapainotus) selitettynä







1. Määritelmä: Mikä on dynaaminen tasapainotus?
Dynaaminen tasapainotus on menettely, jolla korjataan epätasapaino roottorissa tekemällä massakorjauksia vähintään kaksi erillistä tasoa pitkin sen pituutta. Sitä käytetään silloin, kun yhden tason korjaus ei riitä, koska roottori voi yhdistää staattinen (voima) epätasapaino ja parillinen epätasapaino.
2. Staattinen vs. dynaaminen epätasapaino: Keskeinen ero
Dynaamisen tasapainottamisen ymmärtämiseksi on tärkeää erottaa toisistaan kaksi epätasapainon päämuotoa.
- Staattinen epätasapaino: roottorin massakeskipiste on siirtynyt sen pyörimisakselista. Se käyttäytyy kuin yksi “raskas piste”, ja se voidaan korjata yhdellä painolla yhdessä tasossa.staattinen tasapainotus, jota kutsutaan myös nimellä yhden tason tasapainotus).
- Dynaaminen epätasapaino: epätasapaino jakautuu pitkin roottoria, joten yhden tason korjaus ei riitä. Tämä tila havaitaan pyörimisliikkeessä ja vaatii korjauksia kahdessa eri tasossa. Tämä tapahtuu, kun roottorissa on kaksi yhtä raskasta kohtaa vastakkaisissa päissä, jotka sijaitsevat 180°:n etäisyydellä toisistaan. Tämä tila on staattisesti tasapainossa (roottori ei pyörähdä raskaaseen kohtaan levossa), mutta kun se pyörii, kaksi raskasta kohtaa luovat kääntyvän voiman eli "parin", joka saa roottorin heilumaan pää edellä. Parin epätasapaino voidaan *vain* havaita, kun roottori pyörii, ja se voidaan *vain* korjata sijoittamalla painot kahteen eri tasoon vastakkaisen parin luomiseksi.
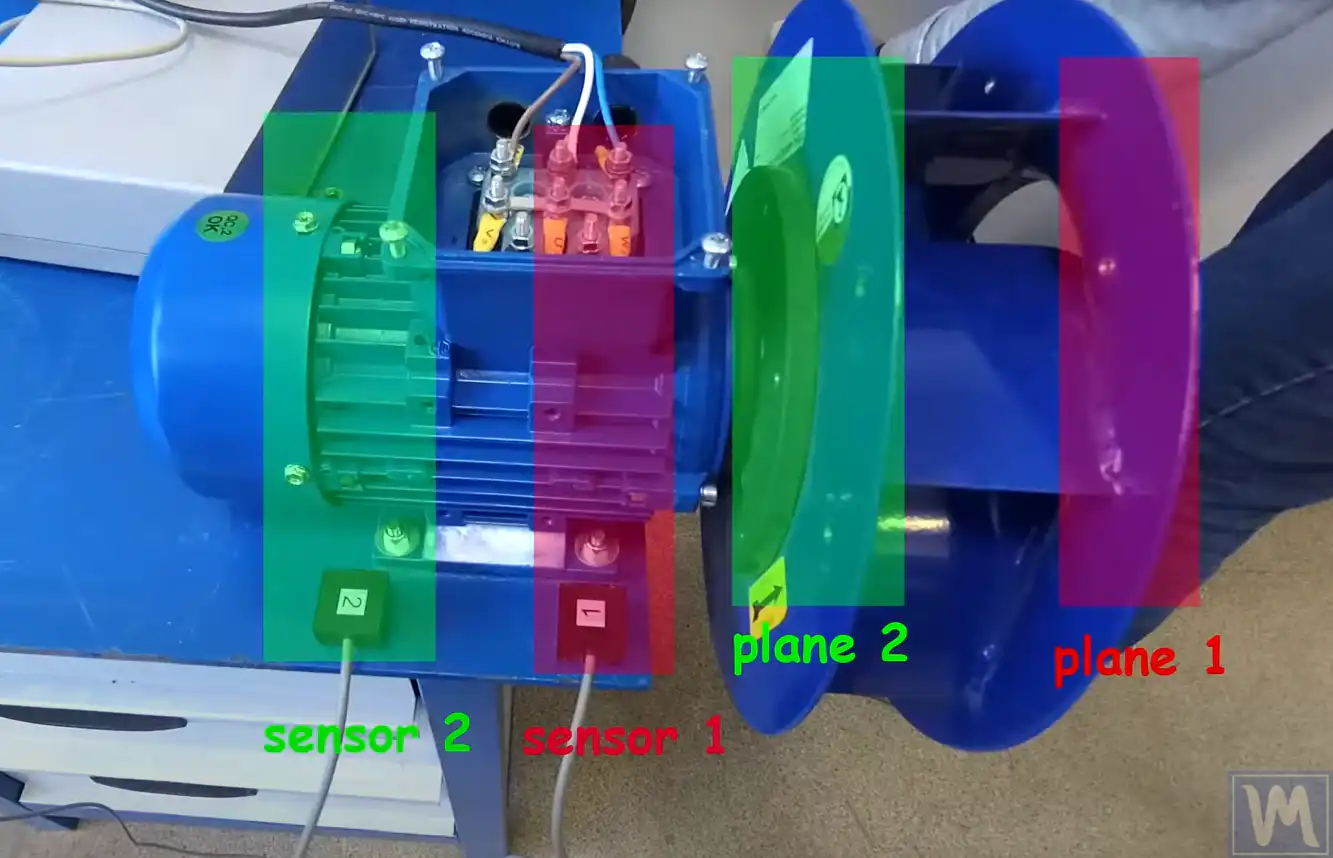
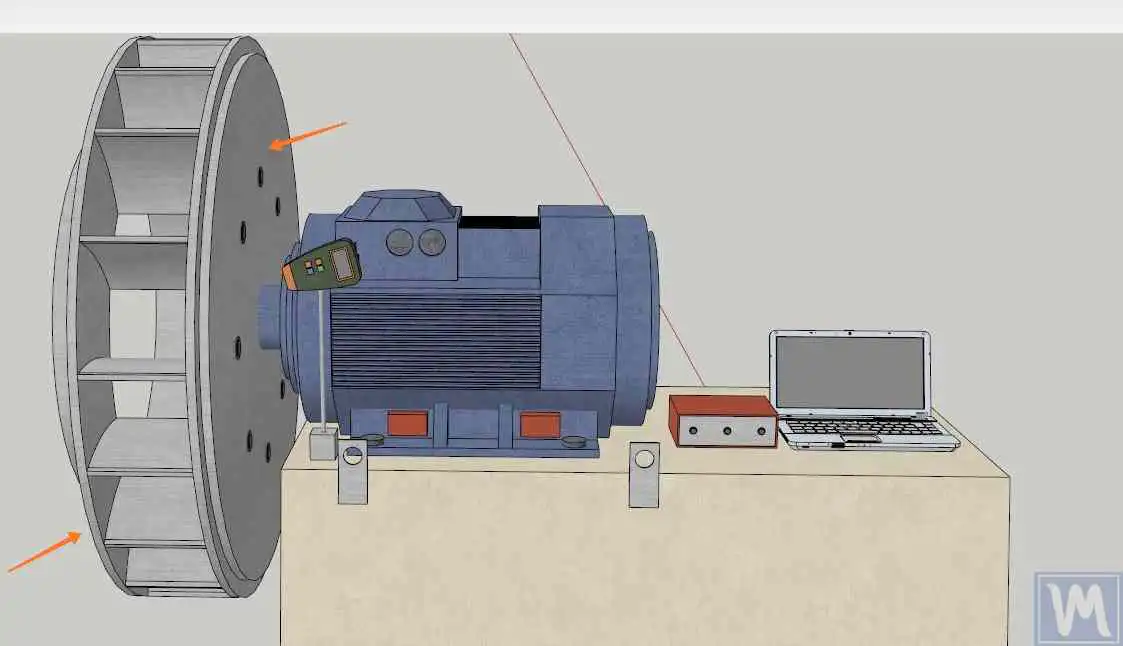
3. Korjaustasot ja anturien sijoittelu
Kahden tason tasapainotus perustuu kolmeen seikkaan:
- Kaksi korjaustasot (tasot 1 ja 2), joihin korjauspainot asennetaan.
- Kaksi tärinän mittauspistettä (tyypillisesti laakeripesien lähellä), jotka on liitetty kahteen kanavaan.
- A vaihe viite (kierroslukumittari + heijastava merkki) nopeuden ja vaiheen mittaamiseen.
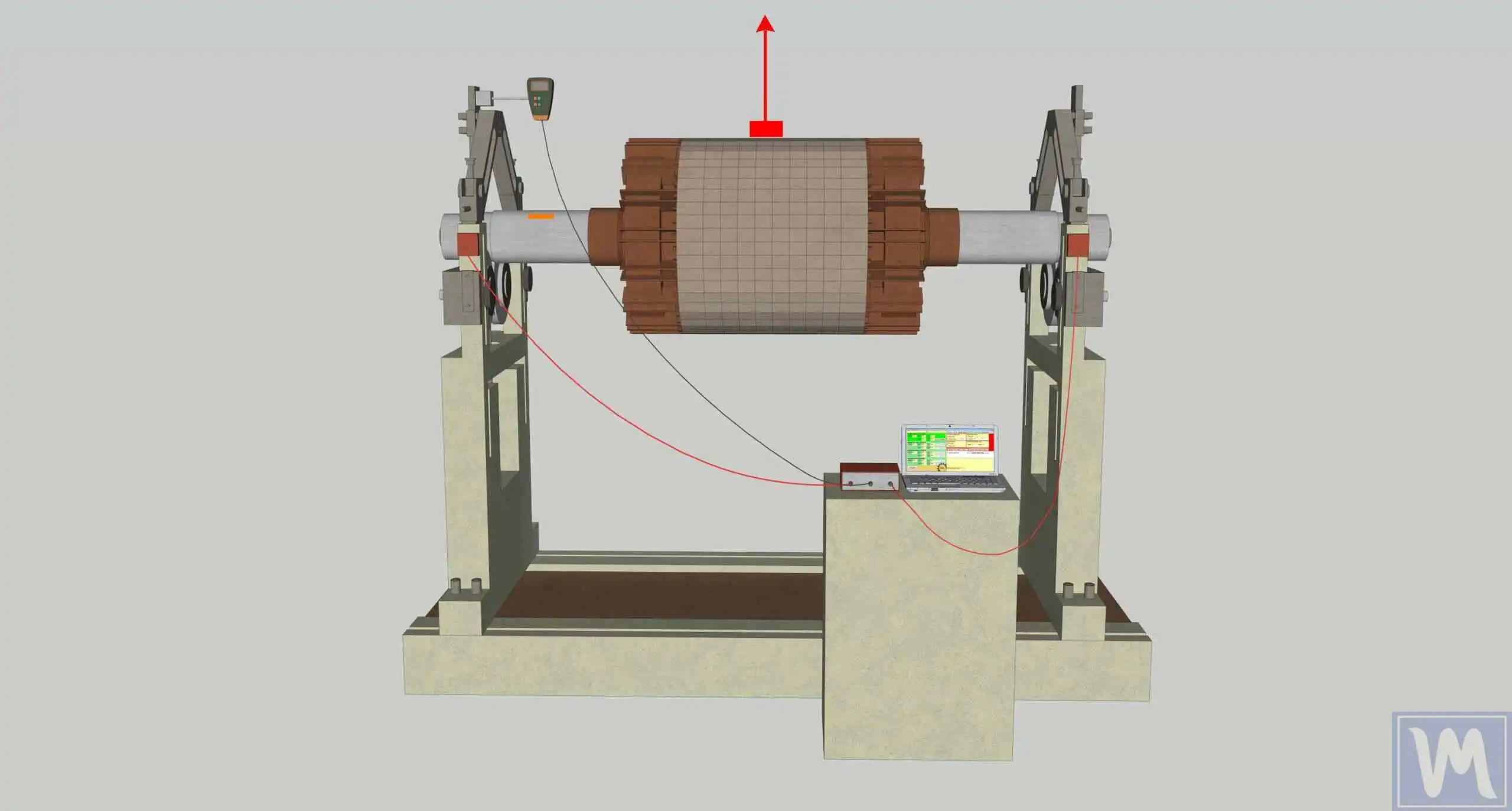
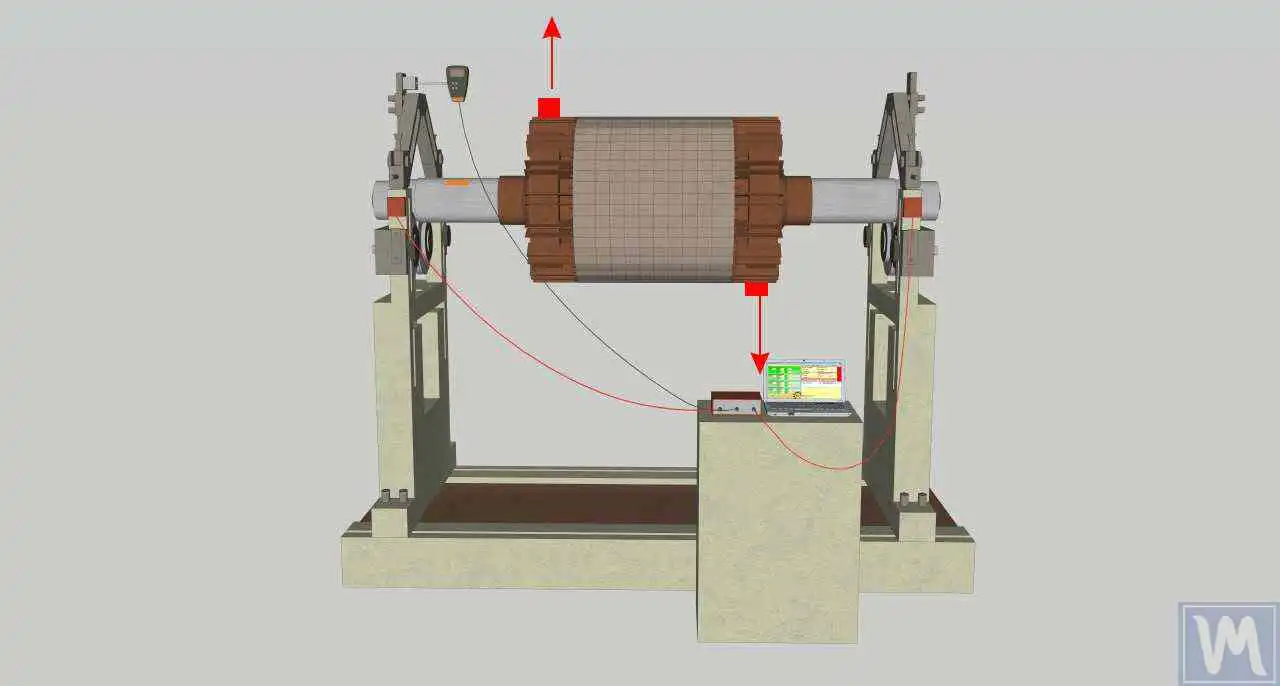
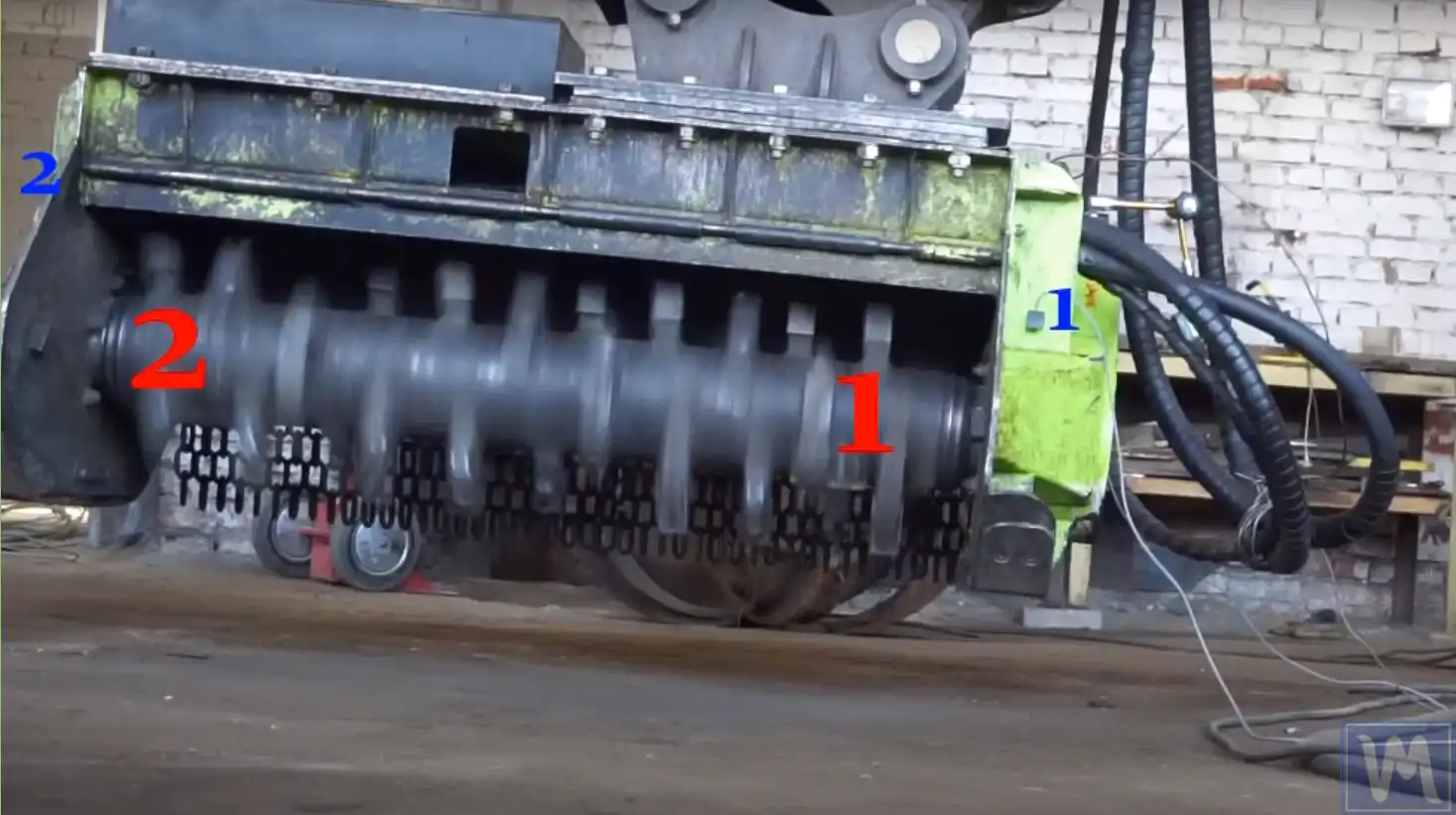
Alla on tyypillisiä esimerkkejä korjaustasoista ja anturien sijoittelusta tavallisimmissa roottorikokoonpanoissa.
4. Kahden tason tasapainotusmenettely
Kenttäolosuhteissa kahden tason tasapainotus suoritetaan yleensä käyttämällä vaikutuskerroinmenetelmä. Tyypillinen etenemisjärjestys on seuraava:
- Ajo #0: mitataan perustason värähtely (amplitudi ja vaihe) ilman koepainoja.
- Ajo #1: asentaa koepaino Mittaa tärinä uudelleen tasossa 1.
- Ajo #2: siirrä koepaino tasolle 2 ja mittaa tärinä uudelleen.
- Laskenta: ohjelmisto laskee korjauspainot tasoille 1 ja 2.
- Korjaus ja tarkastus: poista koepaino, asenna korjauspainot ja suorita tarkistuskierros (tarkistusajo) tuloksen vahvistamiseksi.
Kun laskettu korjauskulma sijoittuu kahden käytettävissä olevan kiinnityskohdan väliin, tarvittava massa voidaan jakaa käytettävissä oleviin paikkoihin käyttämällä kaksitasoisen korjausmassan hajotelmalaskuri, ja taustalla oleva yksitasoinen herkkyys voidaan tarkistaa käyttämällä vaikutuskerroinlaskuri.
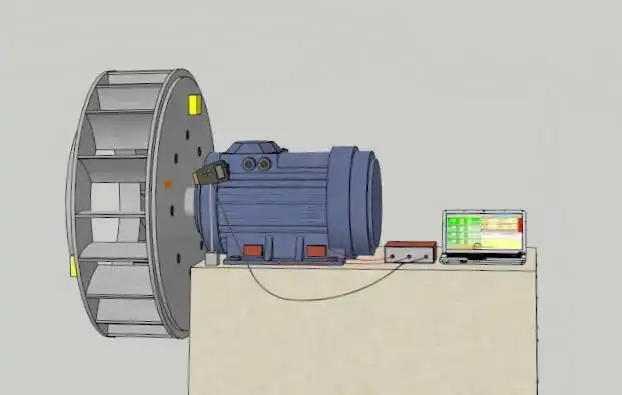
5. Kahden tason tasapainotus Balanset-1A:lla
Balanset-1A on kaksikanavainen, PC-pohjainen tasapainotusjärjestelmä, joka on suunniteltu yhden ja kahden tason roottorin tasapainottamiseen kenttäolosuhteissa ja tuotantoympäristöissä. Kahden tason tilassa Balanset-1A mittaa roottorin nopeuden ja 1x tärinä (RMS ja vaihe) kahdella kanavalla ja laskee korjauspainoparametrit molemmille tasoille.
Koska Balanset-1A kun sitä käytetään suoraan asennetussa koneessa, se suorittaa tasapainotuksen todellisissa käyttöolosuhteissa — mukaan lukien suuntaus, laakereiden esijännitys ja perustuksen vaikutukset — ja ilmoittaa saavutetun jäännösepätasapaino valittua toleranssia vastaan, minkä voi ristiintarkistaa käyttämällä jäännösepätasapainon laskin (ISO 21940-11).
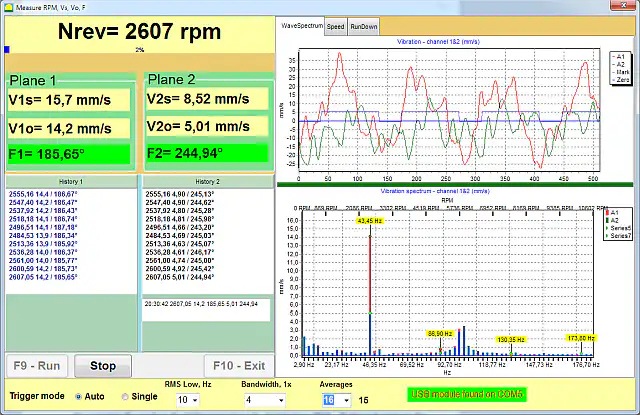
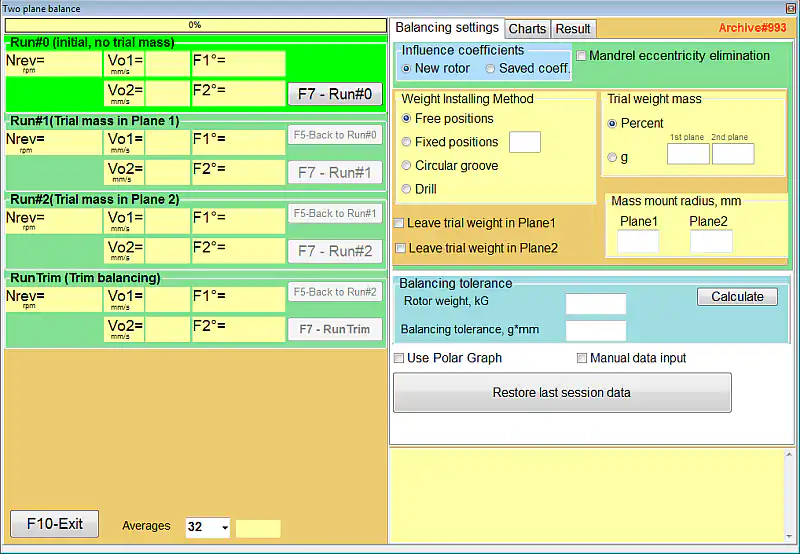
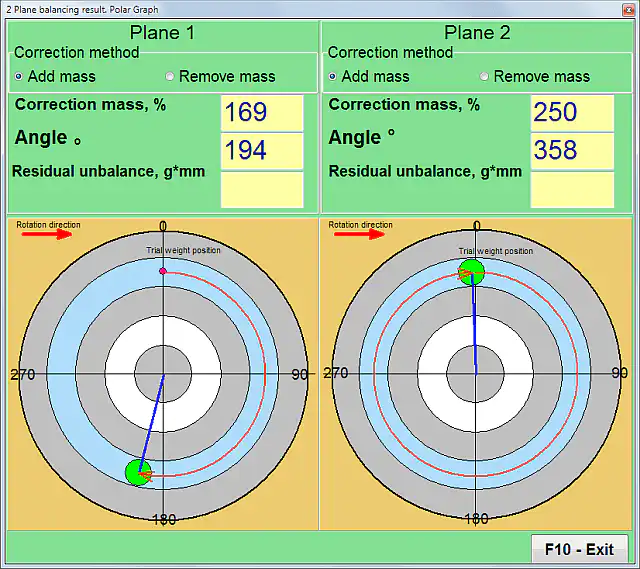
5.1 Ohjelmisto: dynaamisen tasapainotuksen asetukset ja tulosten tarkastelu
5.2 Vibrometritila (nopea tarkastus ennen tasapainottamista)
Ennen tasapainotusta ja sen aikana, Vibrometri Tätä tilaa voidaan käyttää tärinän seurantaan ja mittausten vakaiden toimintaolosuhteiden varmistamiseen.