Dynamisk afbalancering (toplansafbalancering) forklaret







1. Definition: Hvad er dynamisk afbalancering?
Dynamisk afbalancering er en metode til at rette ubalance i en rotor ved at foretage massekorrektioner i et minimum af to separate planer langs dens længde. Den bruges, når korrektion i ét plan ikke er nok, fordi rotoren kan kombinere statisk (kraft) ubalance og parubalance.
2. Statisk vs. dynamisk ubalance: Den vigtigste forskel
For at forstå dynamisk afbalancering er det vigtigt at skelne mellem de to vigtigste former for ubalance.
- Statisk ubalance: Rotorens massemidtpunkt er forskudt i forhold til rotationsaksen. Det opfører sig som et enkelt “tungt punkt” og kan korrigeres med en vægt i et plan.statisk afbalancering, også kaldet enkeltplansbalancering).
- Dynamisk ubalance: Ubalancen er fordelt langs rotoren, så det ikke er nok at korrigere i ét plan. Denne tilstand opdages under rotation og kræver korrektioner i to forskellige planer. Dette sker, når en rotor har to lige tunge punkter i hver sin ende, placeret 180° fra hinanden. Denne tilstand er statisk afbalanceret (den ruller ikke til et tungt punkt i hvile), men når den roterer, skaber de to tunge punkter en drejende kraft eller et "par", som får rotoren til at slingre fra ende til anden. Ubalance i parret kan *kun* opdages, når rotoren drejer, og kan *kun* korrigeres ved at placere vægte i to forskellige planer for at skabe et modsatrettet par.
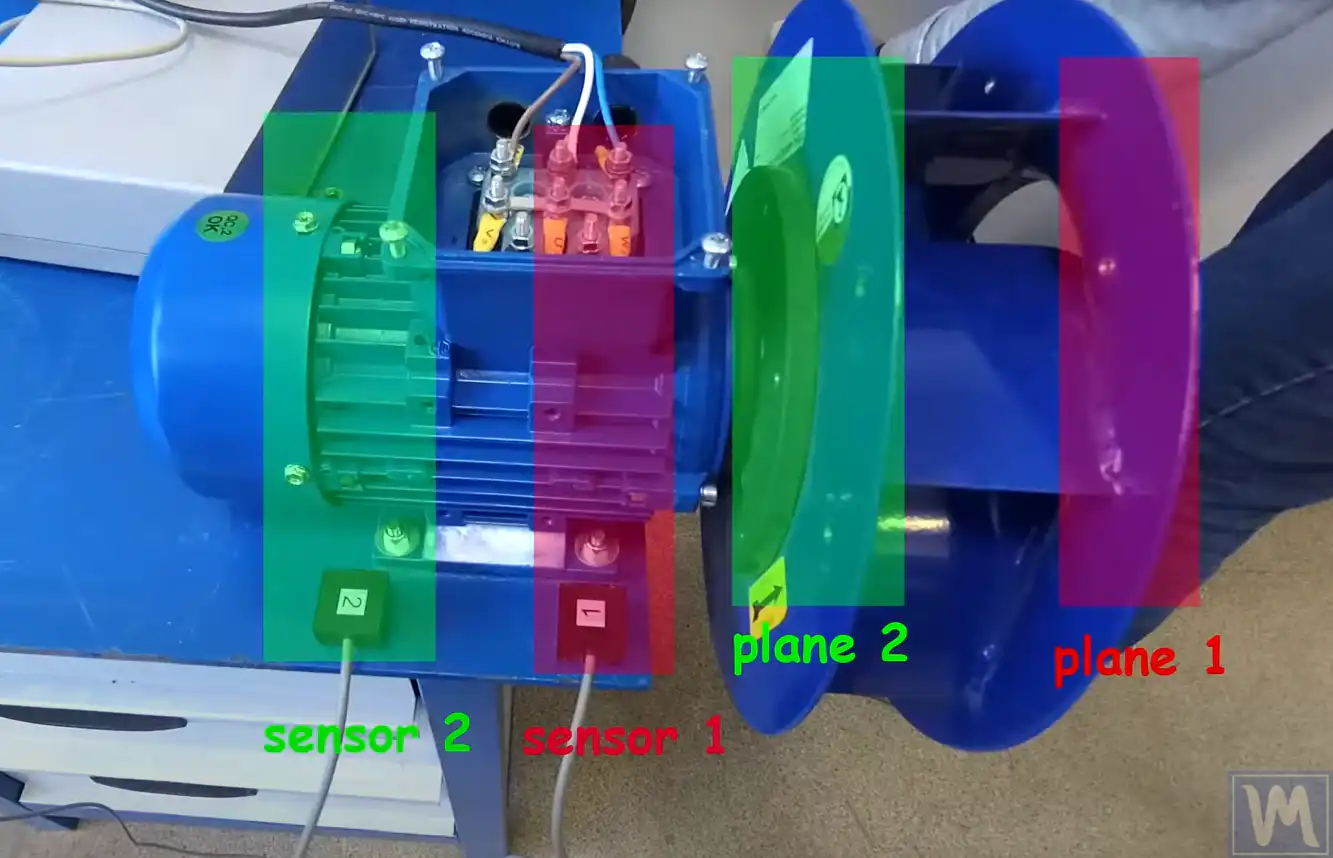
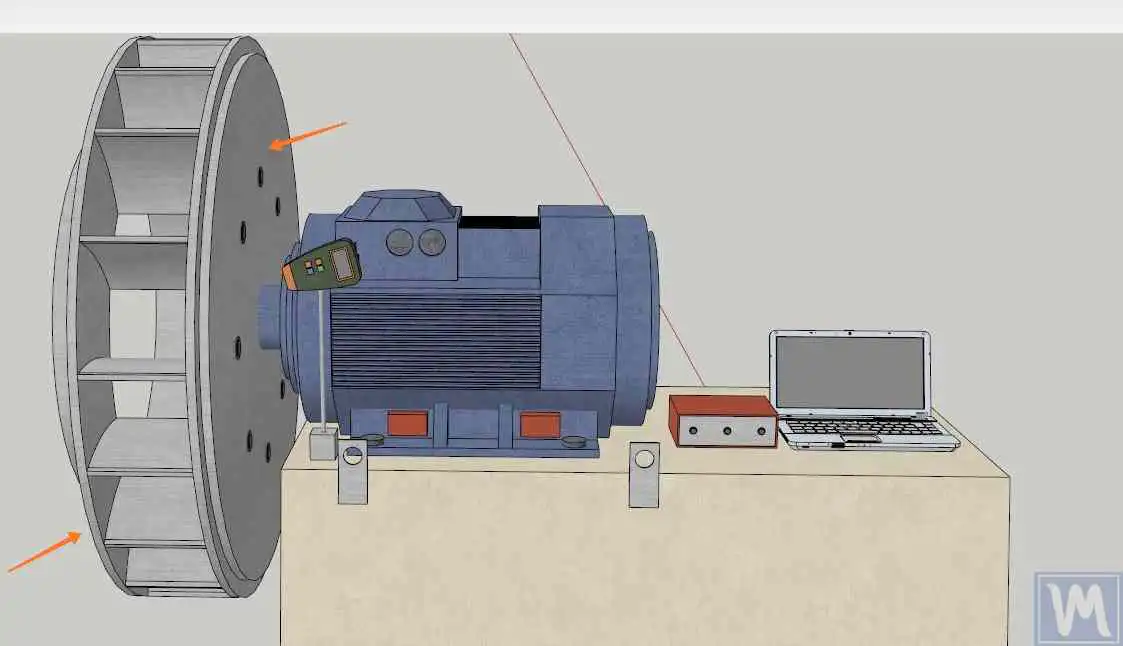
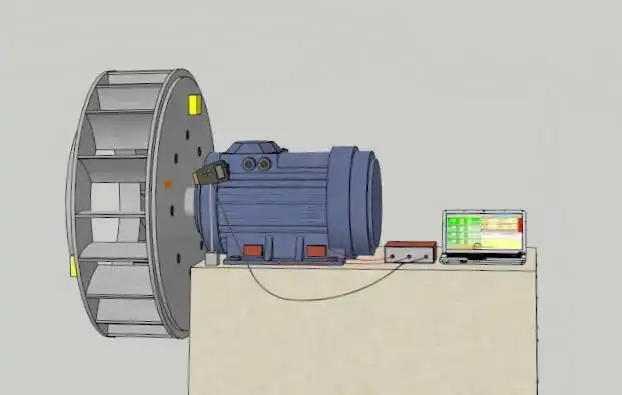
3. Korrektionsplaner og sensorplacering
To-plans balancering bygger på tre ting:
- To korrektionsplaner (Plan 1 og Plan 2), hvor korrektionsvægtene skal installeres.
- To målepunkter for vibrationer (typisk i nærheden af lejehuse), der er forbundet med to kanaler.
- A fase reference (omdrejningstæller + Reflekterende mærke) til at måle hastighed og fase.
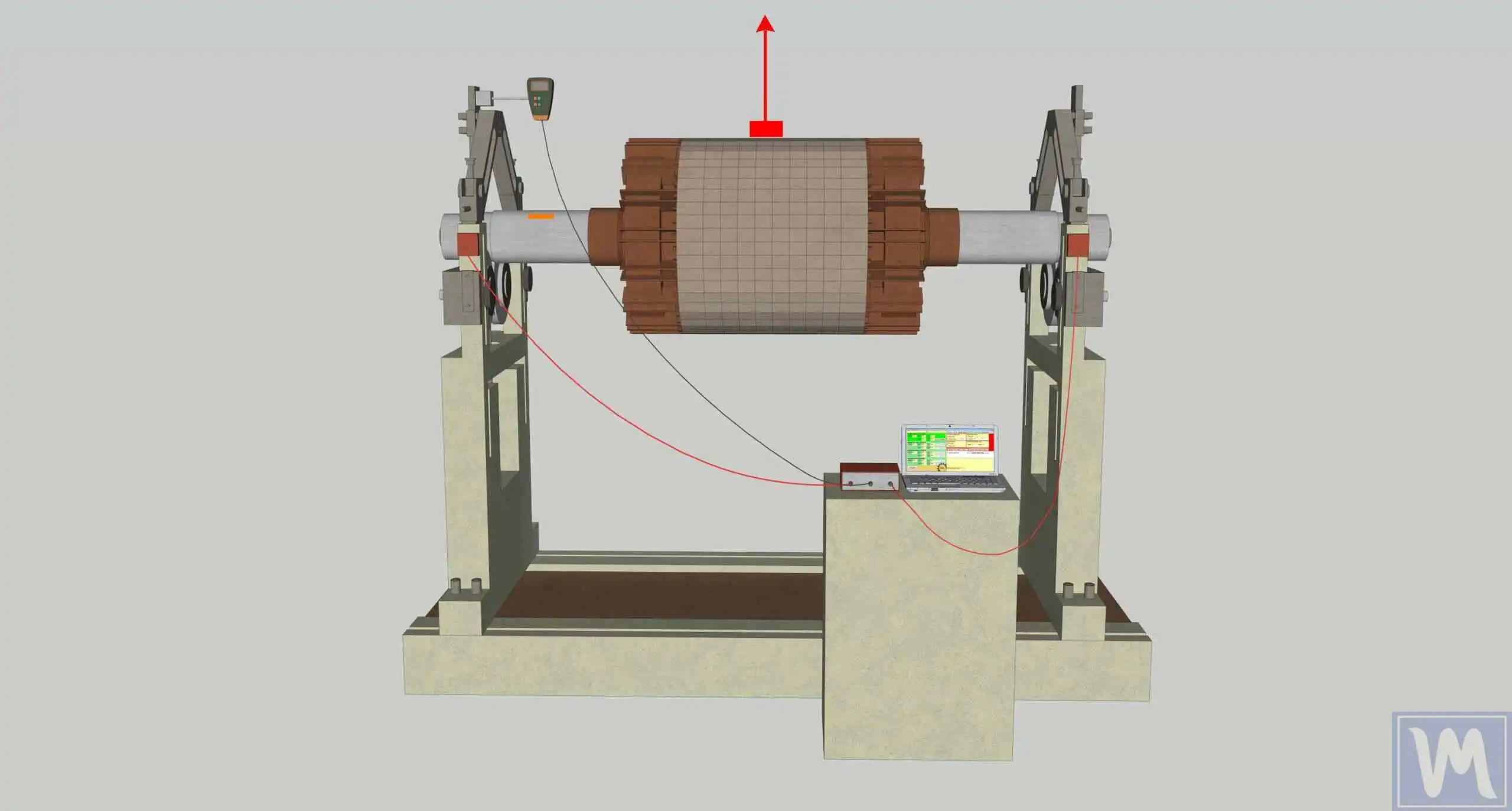
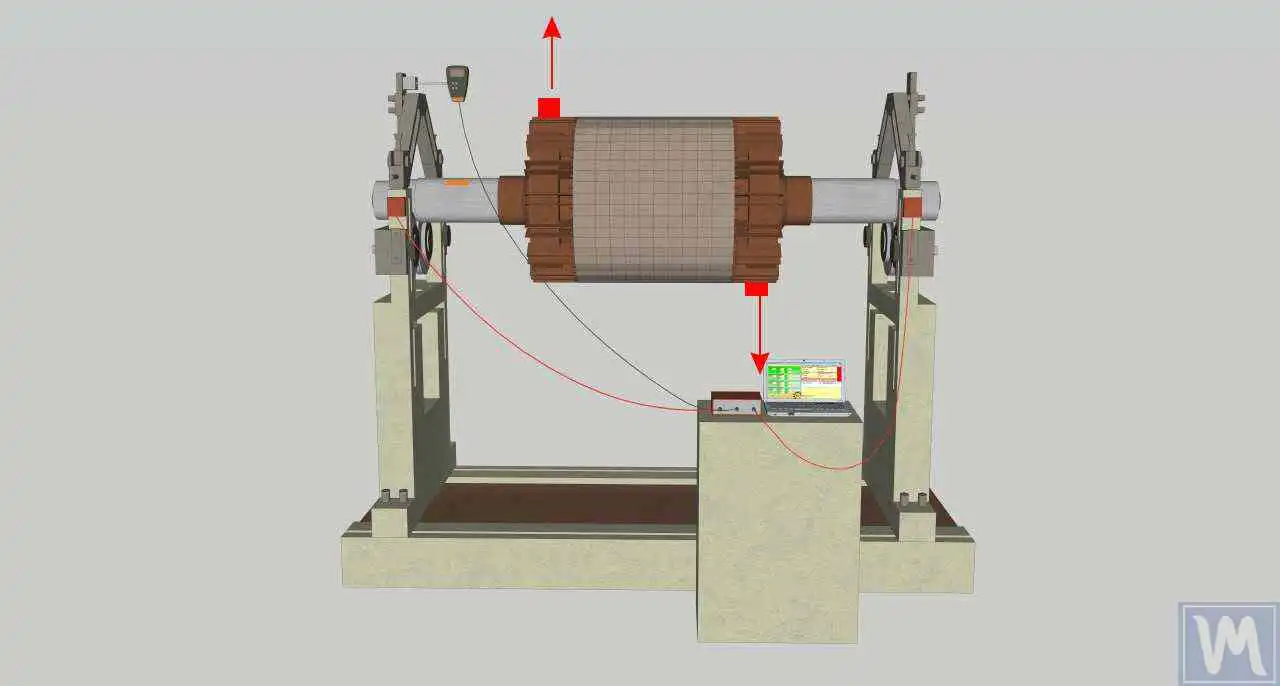
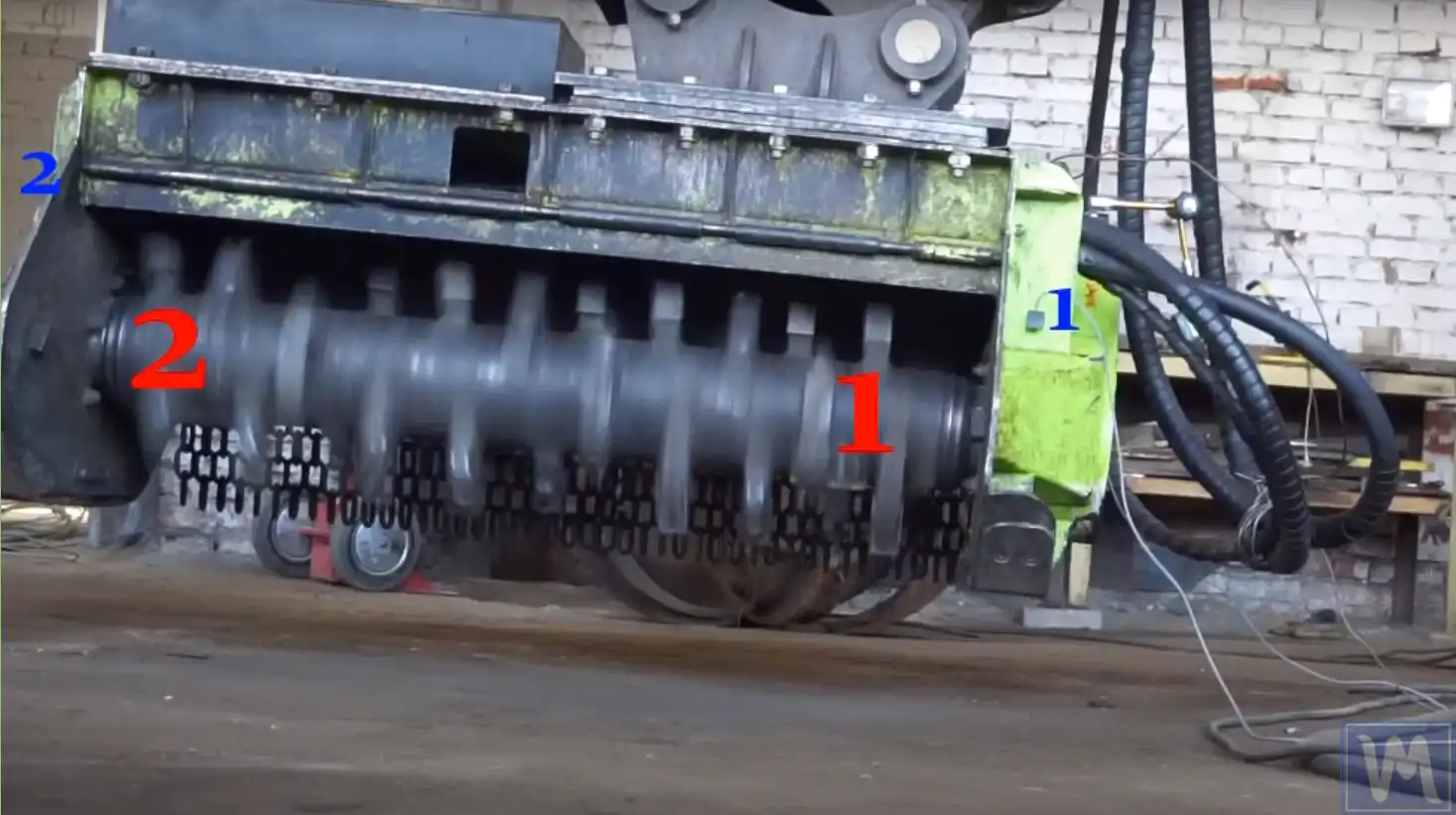
Nedenfor ses typiske eksempler på korrektionsplaner og sensorplacering for almindelige rotorkonfigurationer.
4. Proceduren for afbalancering i to planer
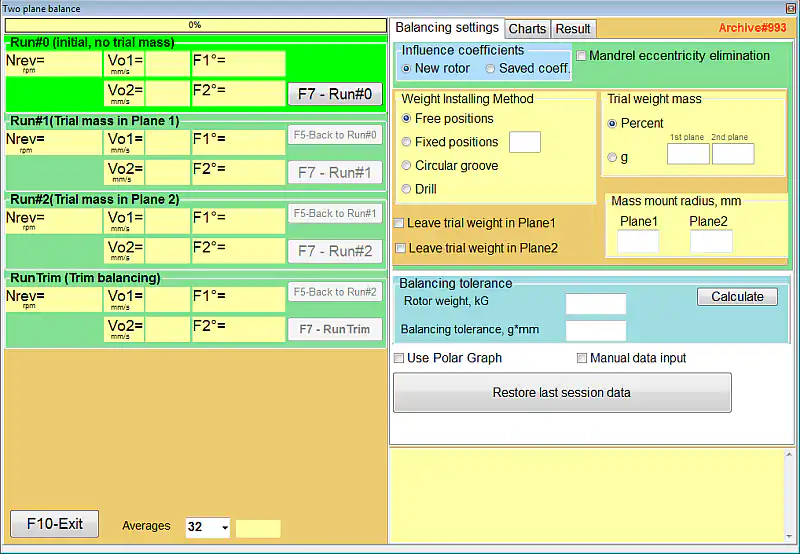
I praksis udføres to-plan-afbalancering typisk ved hjælp af påvirkningskoefficientmetoden. Den typiske rækkefølge er:
- Koersel #0: maal en referencevibration (amplitude og fase) uden provevaegte.
- Koersel #1: installere en prøvevægt i plan 1, maale vibrationen igen.
- Koersel #2: flyt provevaegten til plan 2, og maal vibrationen igen.
- Beregning: softwaren beregner korrektionsvægte for plan 1 og plan 2.
- Korrektion og verifikation: Fjern prøvevægten, monter korrektionsvægtene og udfør en kontrolkørsel (trimkoersel) for at bekræfte resultatet.
Naar en beregnet korrektionsvinkel falder mellem to tilgaengelige fastgoerelsespunkter, kan den noedvendige masse opdeles paa de tilgaengelige positioner ved hjaelp af en beregner til opdeling af korrektionsmasse i to planer, og den underliggende følsomhed i et enkelt plan kan kontrolleres ved hjælp af en Beregner til indflydelseskoefficient.
5. Balancering i to planer med Balanset-1A
Balanset-1A er et pc-baseret afbalanceringssystem med to kanaler, der er designet til rotorafbalancering i ét og to planer under feltforhold og i produktionsmiljøer. I to-plan-tilstand måler Balanset-1A rotorhastigheden og vektoren af 1 gang vibration (RMS og fase) på to kanaler og beregner parametre for korrektionsvægt for begge planer.
Fordi den Balanset-1A anvendes direkte på den monterede maskine, foretager den en afbalancering under reelle driftsforhold — herunder justering, lejeforspænding og fundamentpåvirkninger — og angiver det opnåede resterende ubalance i forhold til den valgte tolerance, hvilket kan krydstjekkes med en Beregner til restubalance (ISO 21940-11).
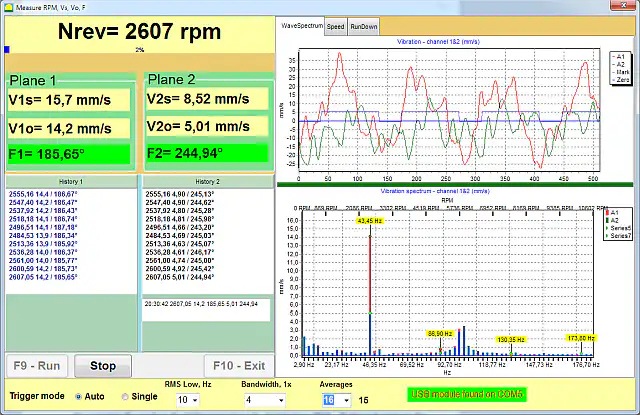
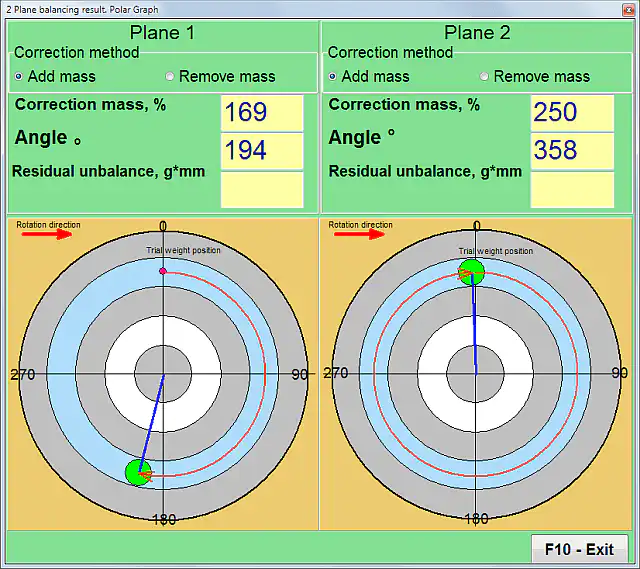
5.1 Software: opsætning af dynamisk afbalancering og resultatvisning
5.2 Vibrometertilstand (hurtig kontrol før afbalancering)
Før og under afbalanceringen, Vibrometer Vibrometer-tilstand kan bruges til at overvaage vibrationer og bekraefte stabile driftsforhold for maalingerne.