Razlaga dinamičnega uravnoteženja (dvoravninskega uravnoteženja)







1. Opredelitev: Kaj je dinamično uravnoteženje?
Dinamično uravnoteženje je postopek za popravljanje neuravnoteženost v rotorju z izvedbo popravkov mase v najkrajšem možnem času dve ločeni ravnini po vsej dolžini. Uporablja se, kadar korekcija v eni ravnini ne zadostuje, saj lahko rotor združuje statična (silna) neuravnoteženost in . parna neuravnoteženost.
2. Statična in dinamična neuravnoteženost: ključna razlika
Za razumevanje dinamičnega uravnoteženja je pomembno razlikovati med dvema glavnima oblikama neuravnoteženosti.
- Statična neuravnoteženost: masno središče rotorja je odmaknjeno od osi vrtenja. Obnaša se kot ena sama “težka točka” in jo je mogoče popraviti z eno utežjo v eni ravnini.statično uravnoteženje, imenovan tudi uravnoteženje v eni ravnini).
- Dinamično neuravnoteženje: neuravnoteženost je razporejena vzdolž rotorja, tako da korekcija v eni ravnini ni dovolj. To stanje se zazna pri vrtenju in zahteva popravke v dveh različnih ravninah. To se zgodi, kadar ima rotor dve enako težki točki na nasprotnih koncih, ki sta med seboj oddaljeni 180°. Takšno stanje je statično uravnoteženo (v mirovanju se rotor ne prevrača na težko točko), vendar pri vrtenju obe težki točki ustvarita vrtilno silo ali "par", ki povzroči nihanje rotorja od konca do konca. Neuravnoteženost para je mogoče zaznati le, ko se rotor vrti, in jo je mogoče odpraviti le tako, da se uteži postavijo v dve različni ravnini, da se ustvari nasprotni par.
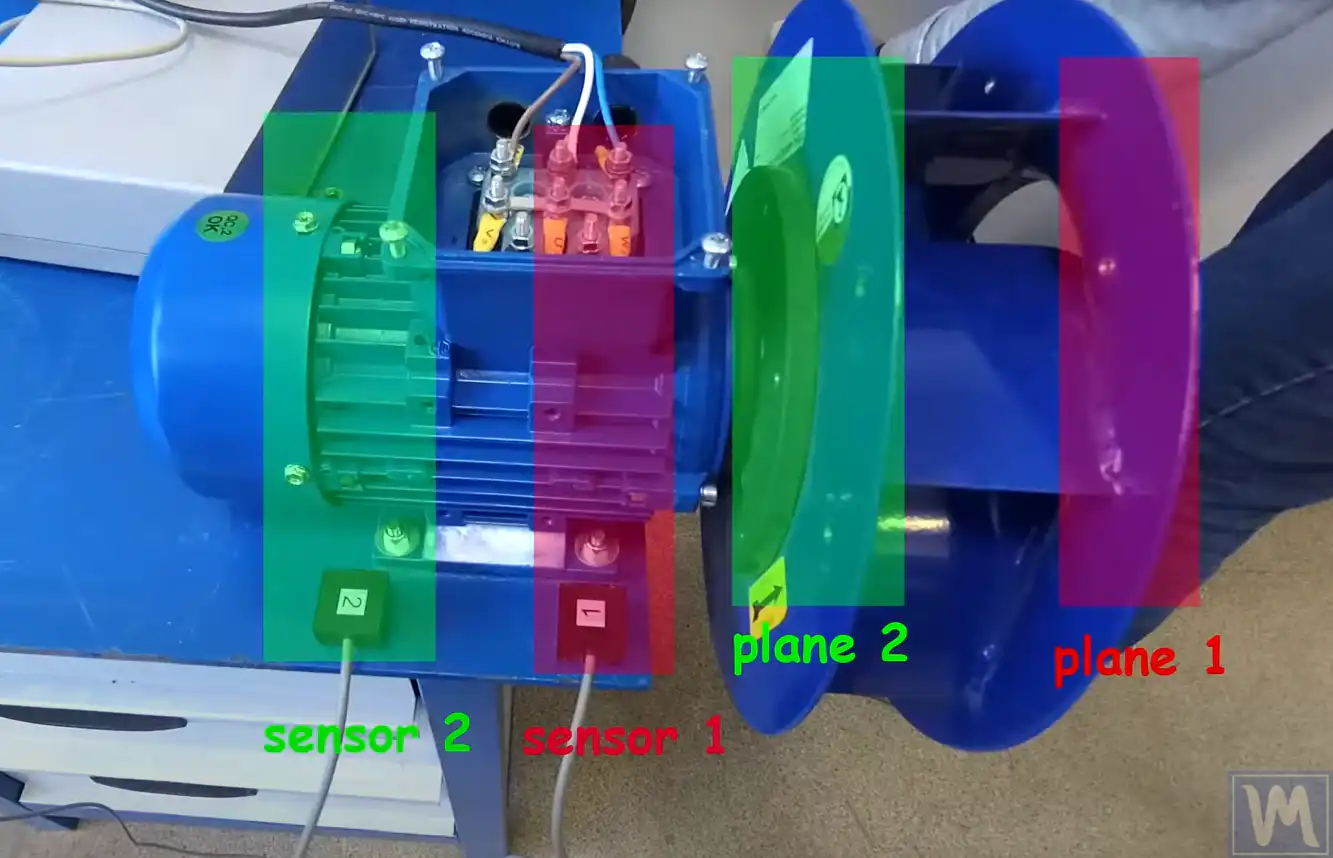
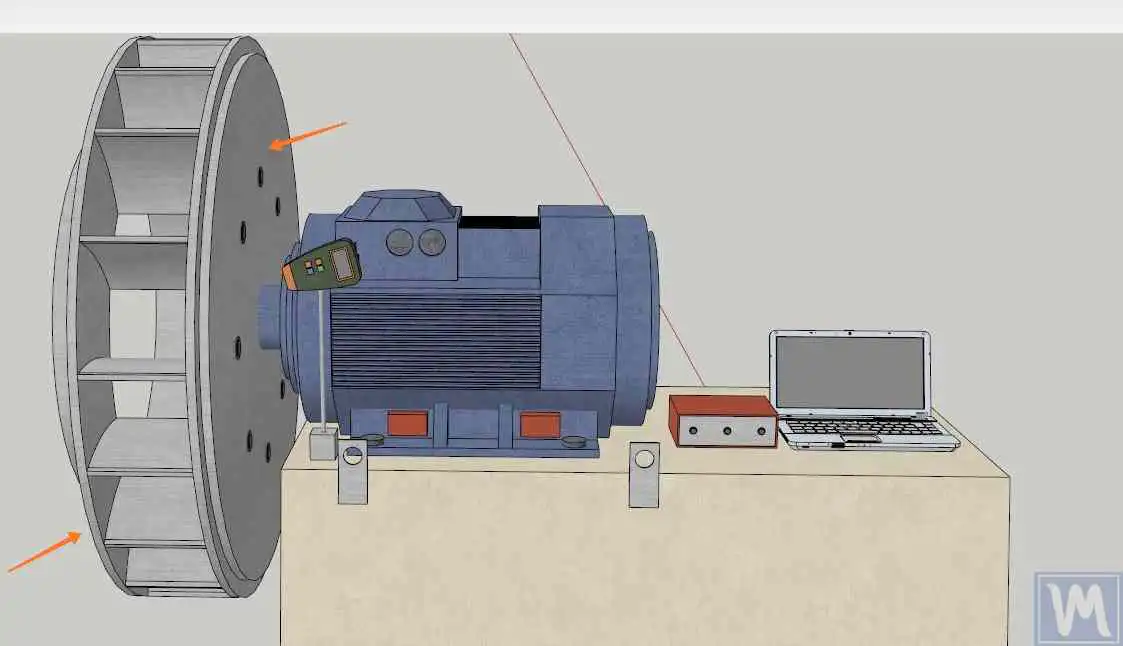
3. Ravnine korekcije in postavitev senzorjev
Dvoravninsko uravnoteženje temelji na treh stvareh:
- Dva korekcijske ravnine (ravnina 1 in ravnina 2), kjer bodo nameščene korekcijske uteži.
- Dve točki za merjenje vibracij (običajno v bližini ohišij ležajev), povezanih z dvema kanaloma.
- A faza referenca (tahometer + odsevni znak) za merjenje hitrosti in faze.
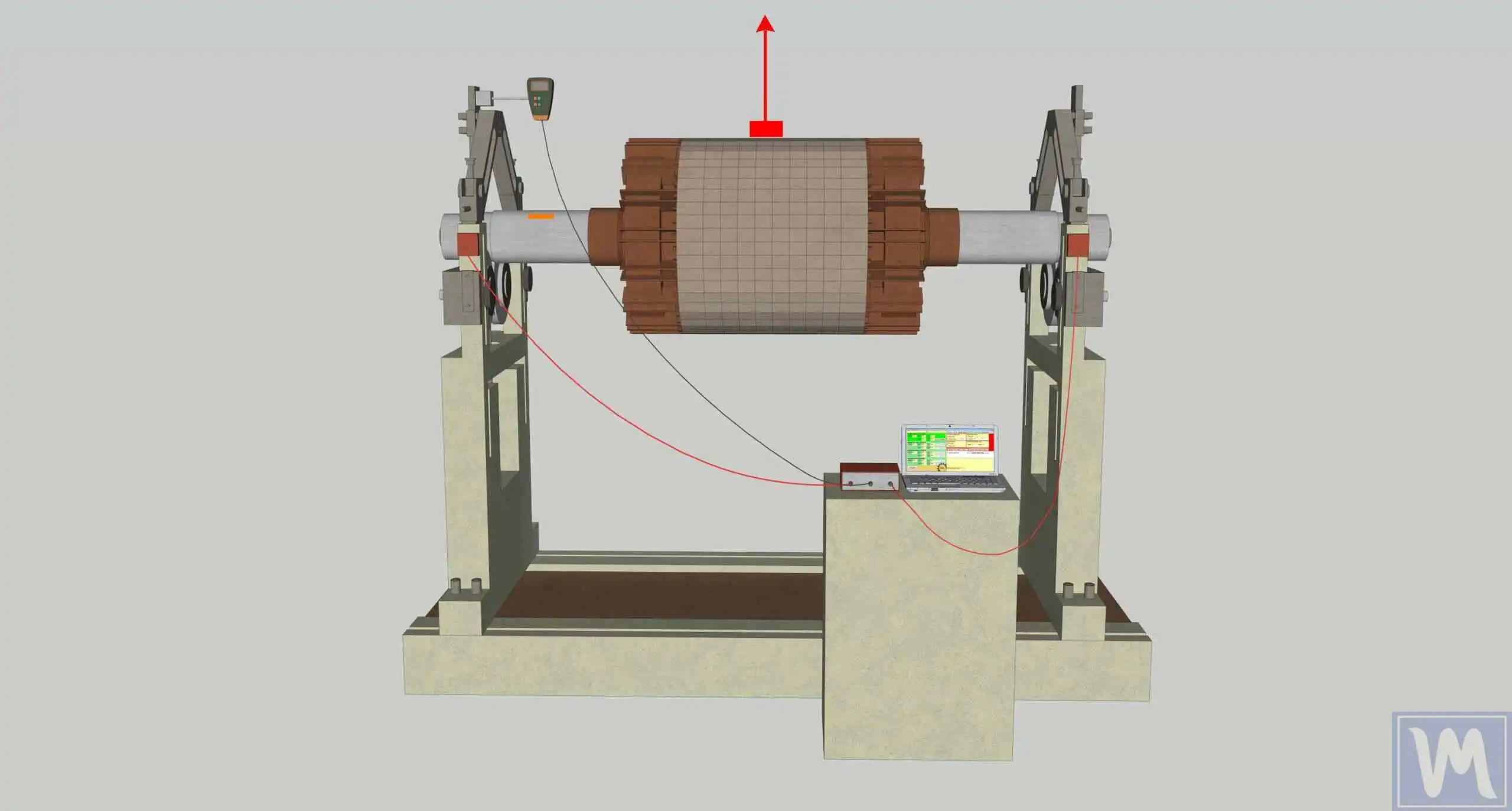
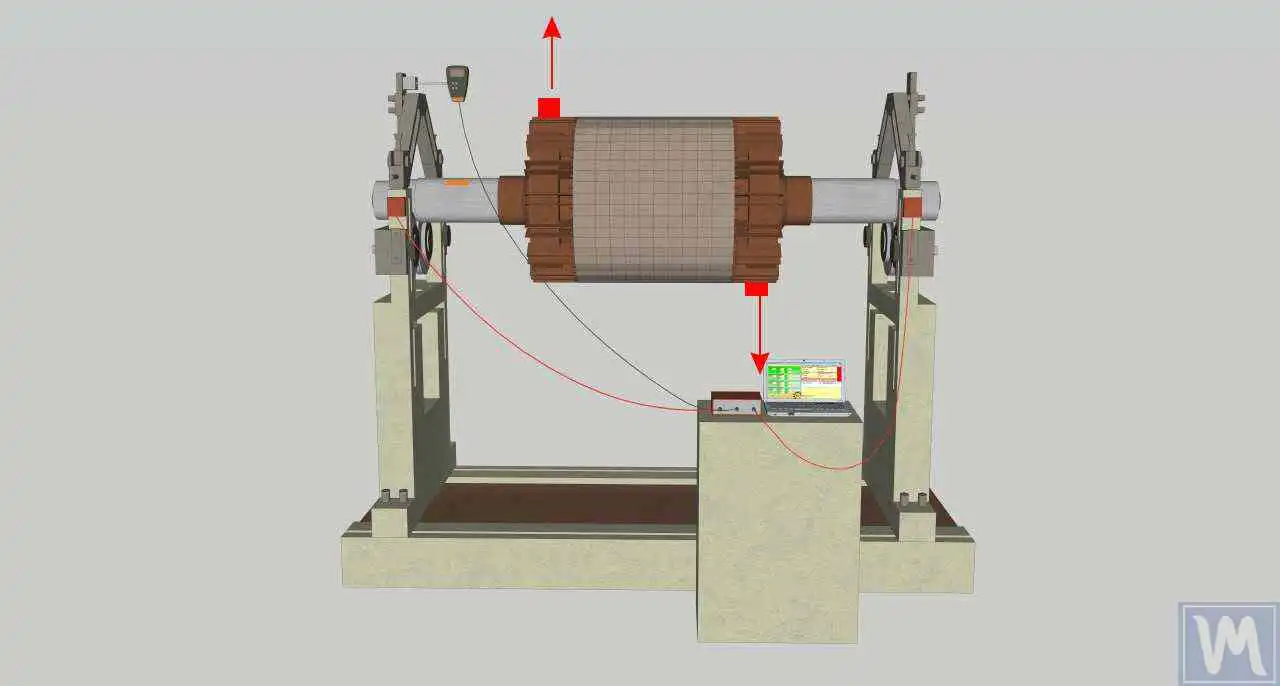
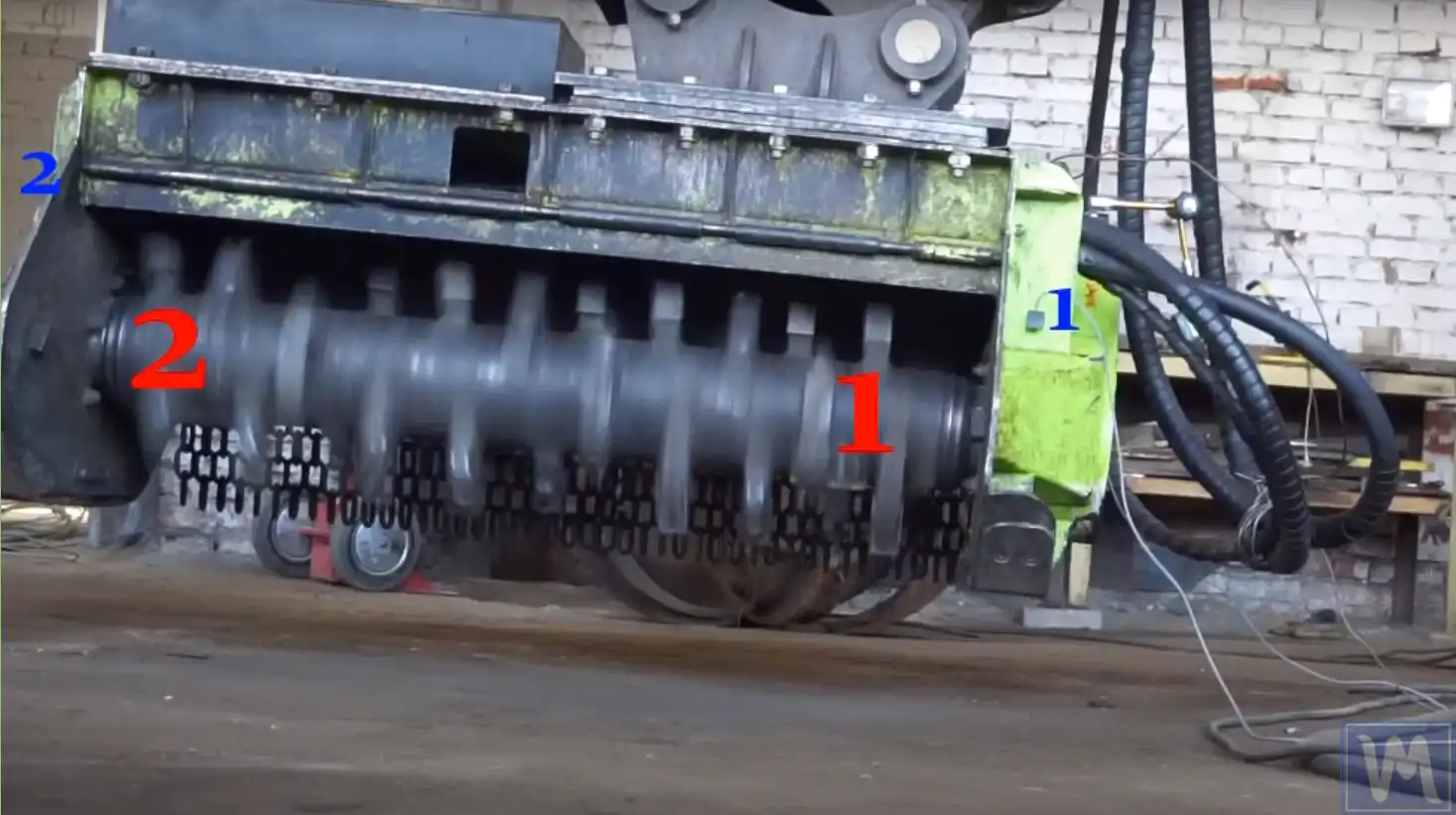
Spodaj so prikazani tipični primeri, ki prikazujejo korekcijske ravnine in postavitev senzorjev za običajne konfiguracije rotorjev.
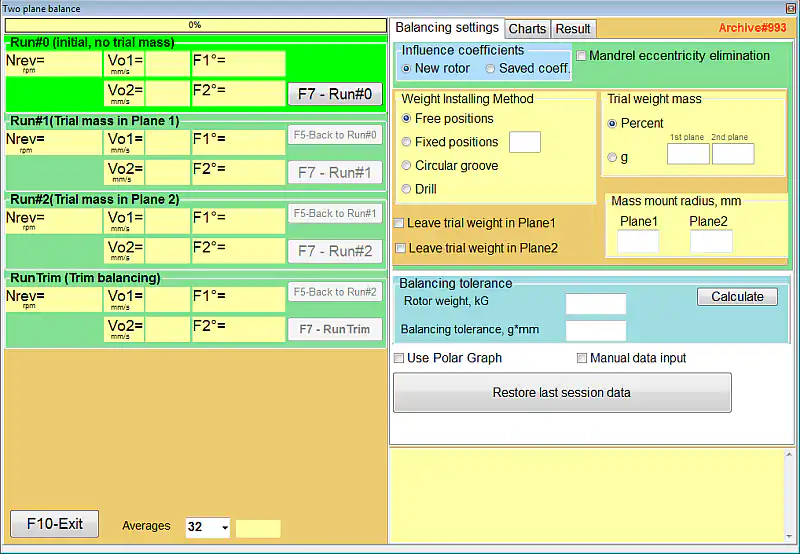
4. Postopek uravnoteženja dveh ravnin
V praksi se uravnoteženje dveh ravnin običajno izvaja z uporabo metoda vplivnih koeficientov. Tipični potek je:
- Izvedite #0: izmerite osnovno vibracijo (amplituda in faza) brez poskusnih uteži.
- Izvedite #1: namestite poskusna teža V ravnini 1 ponovno izmerite vibracije.
- Izvedite #2: prestavite preskusno utež na ravnino 2 in ponovno izmerite vibracije.
- Izračun: programska oprema izračuna korekcijske uteži za ravnini 1 in 2.
- Popravki in preverjanje: odstranite preskusno utež, namestite korekcijske uteži in opravite preveritveni preizkus (obrezovanje) za potrditev rezultata.
Če se izračunani korekcijski kot nahaja med dvema dostopnima pritrdilnima točkama, je mogoče potrebno maso razporediti na razpoložljive položaje s pomočjo kalkulator za razčlenitev korekcijske mase v dveh ravninah, občutljivost v eni ravnini pa je mogoče preveriti z kalkulator koeficienta vpliva.
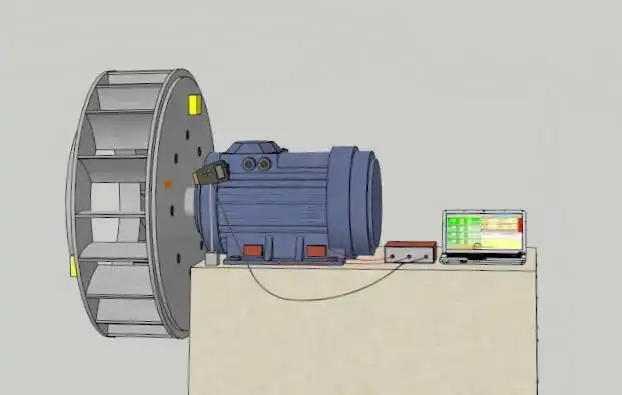
5. Izravnava dveh ravnin z napravo Balanset-1A
Balanset-1A je dvokanalni sistem za uravnoteženje, ki temelji na računalniku in je zasnovan za uravnoteženje rotorjev v eni in dveh ravninah na terenu in v proizvodnih okoljih. V dvotirnem načinu Balanset-1A meri hitrost rotorja in vektor 1x vibracija (RMS in faza) na dveh kanalih in izračuna parametre korekcijskih uteži za obe ravnini.
Ker je Balanset-1A če se uporablja neposredno na nameščenem stroju, izvede uravnoteženje v dejanskih obratovalnih pogojih – vključno z uravnoteženjem, prednapetostjo ležajev in vplivi temeljev – ter poroča o doseženih preostala neuravnoteženost v primerjavi z izbrano toleranco, kar je mogoče preveriti s pomočjo kalkulator preostalega nesorazmerja (ISO 21940-11).
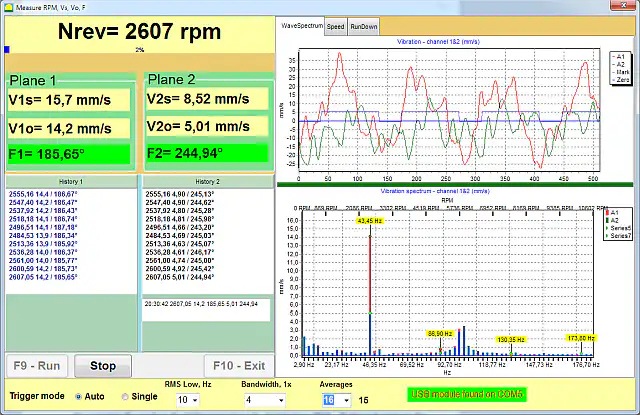
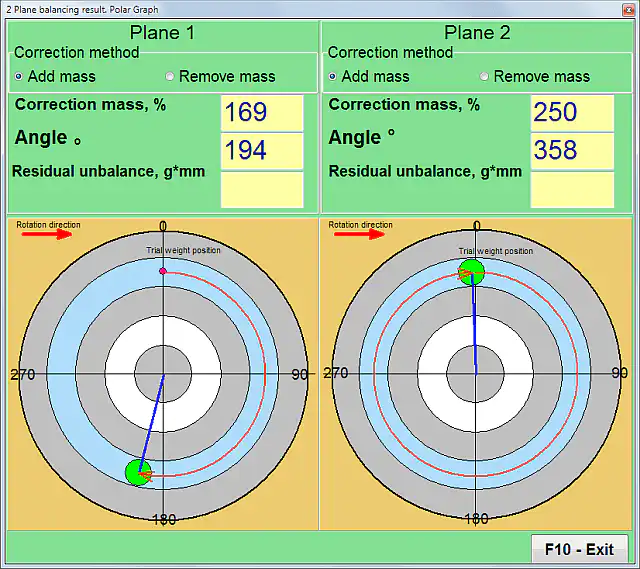
5.1 Programska oprema: nastavitev dinamičnega uravnoteženja in prikaz rezultatov
5.2 Način vibrometra (hiter pregled pred uravnoteženjem)
Pred uravnoteženjem in med njim, Vibrometer Ta način se lahko uporabi za spremljanje vibracij in preverjanje stabilnih pogojev delovanja med merjenjem.