动态平衡(双平面平衡)讲解







1. 定义:什么是动平衡?
动态平衡 是一种用于更正的程序 不平衡 在转子中,通过在最小 两个独立的平面 沿其长度方向。当一个平面内的校正不够时,就可以使用这种方法,因为转子可以将以下方面结合起来 静态(力)不平衡 和 偶不平衡.
2. 静态不平衡与动态不平衡:关键区别
要了解动态平衡,必须区分两种主要的不平衡形式。
- 静态不平衡: 转子的质心偏离旋转轴。这就像一个单一的 “重点”,可以用一个平面上的砝码来校正。.静态平衡, also called 单平面平衡).
- 动态不平衡: 不平衡沿转子分布,因此一个平面的校正是不够的。这种情况在旋转中被检测到,需要在两个不同的平面上进行修正。当转子的两端有两个相等的重点,位置相距 180°,就会出现这种情况。这种情况是静态平衡的(静止时不会向重点滚动),但当它旋转时,两个重点会产生一个转动力,或称 "耦合",导致转子两端晃动。只有在转子旋转时才能检测到耦合不平衡,而且只有通过在两个不同平面上放置砝码来产生相反的耦合,才能**纠正耦合不平衡。.
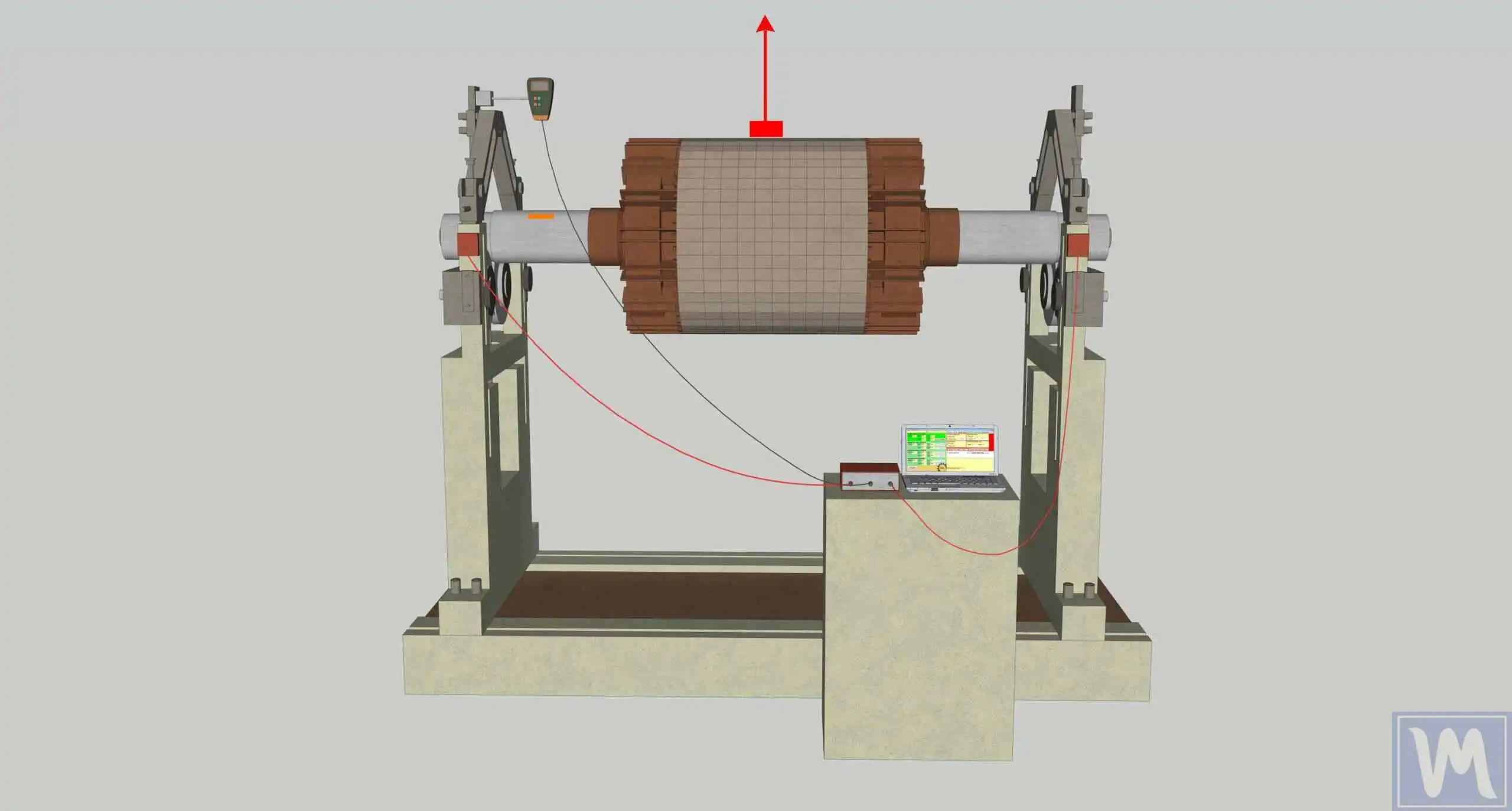
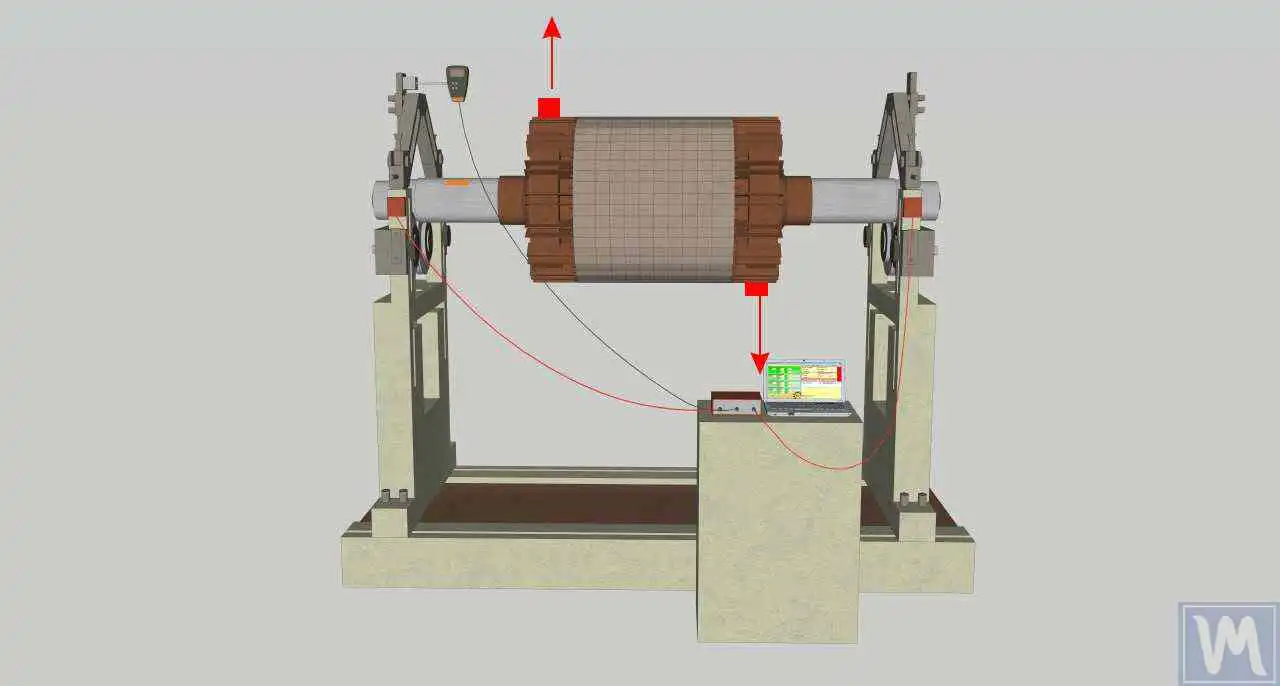
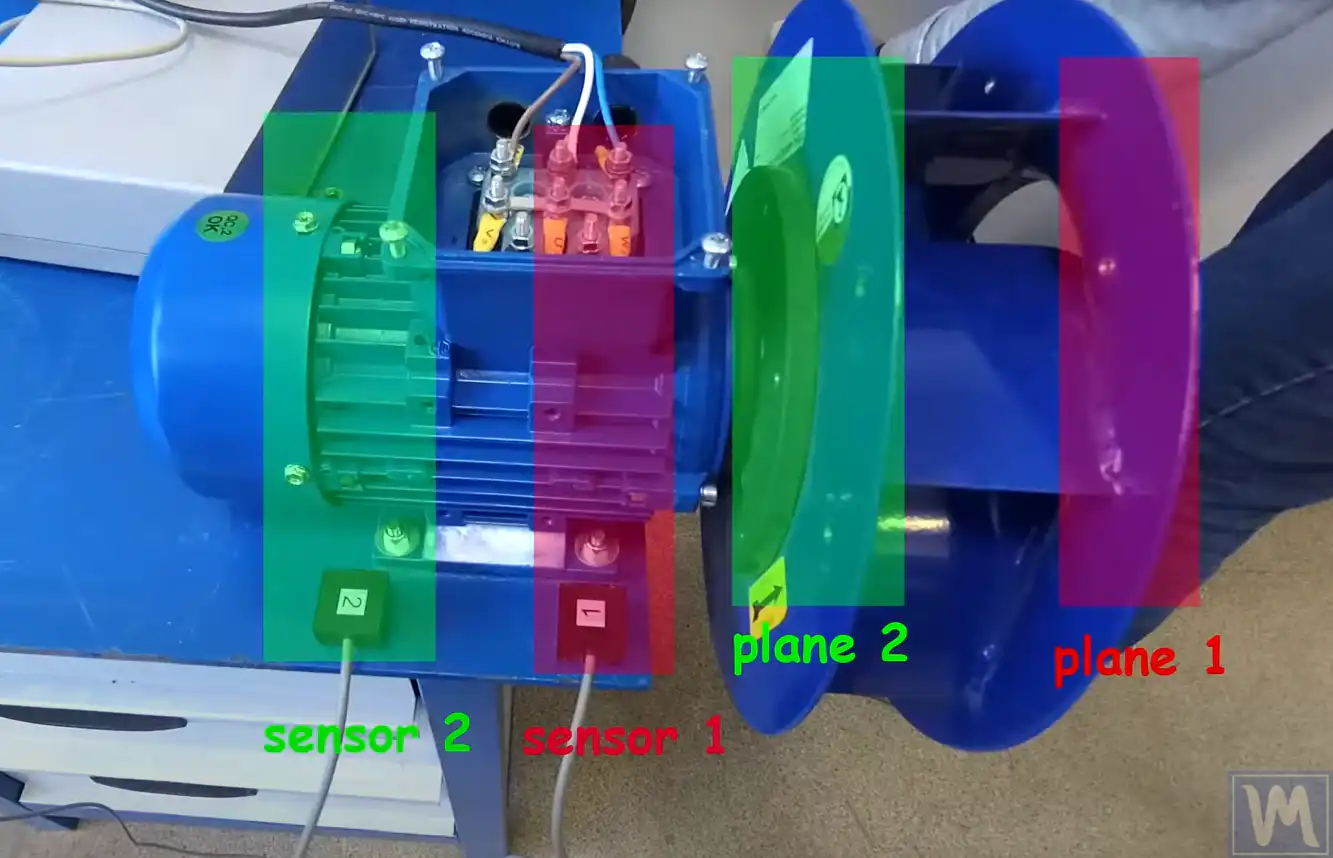
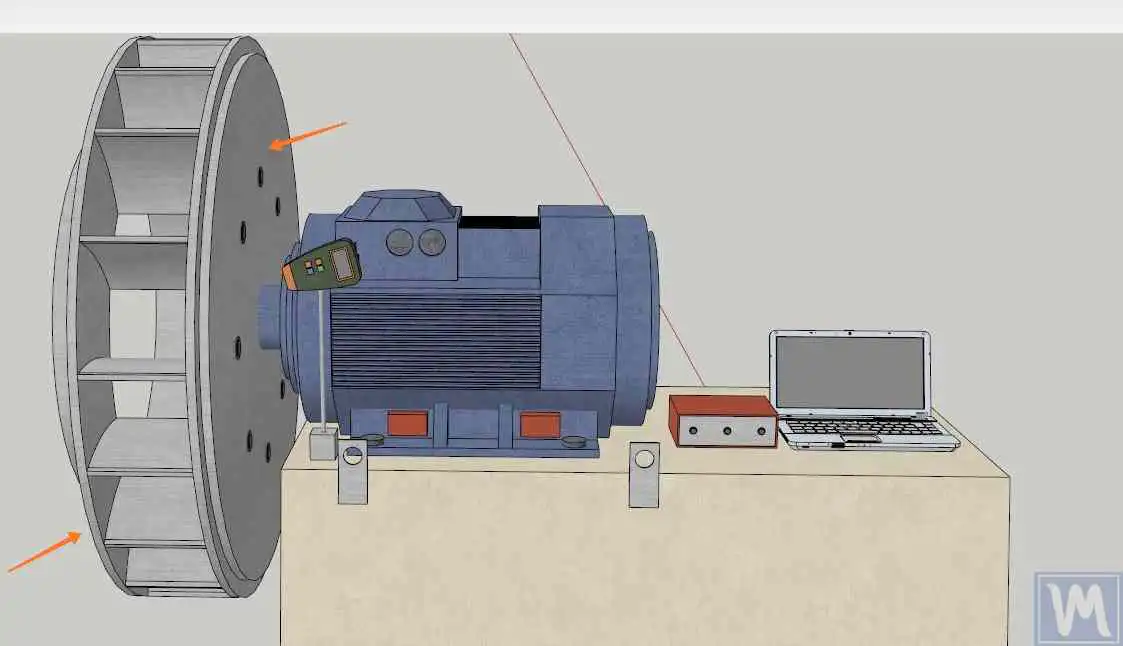
3. 校正平面和传感器位置
双平面平衡 基于以下三点:
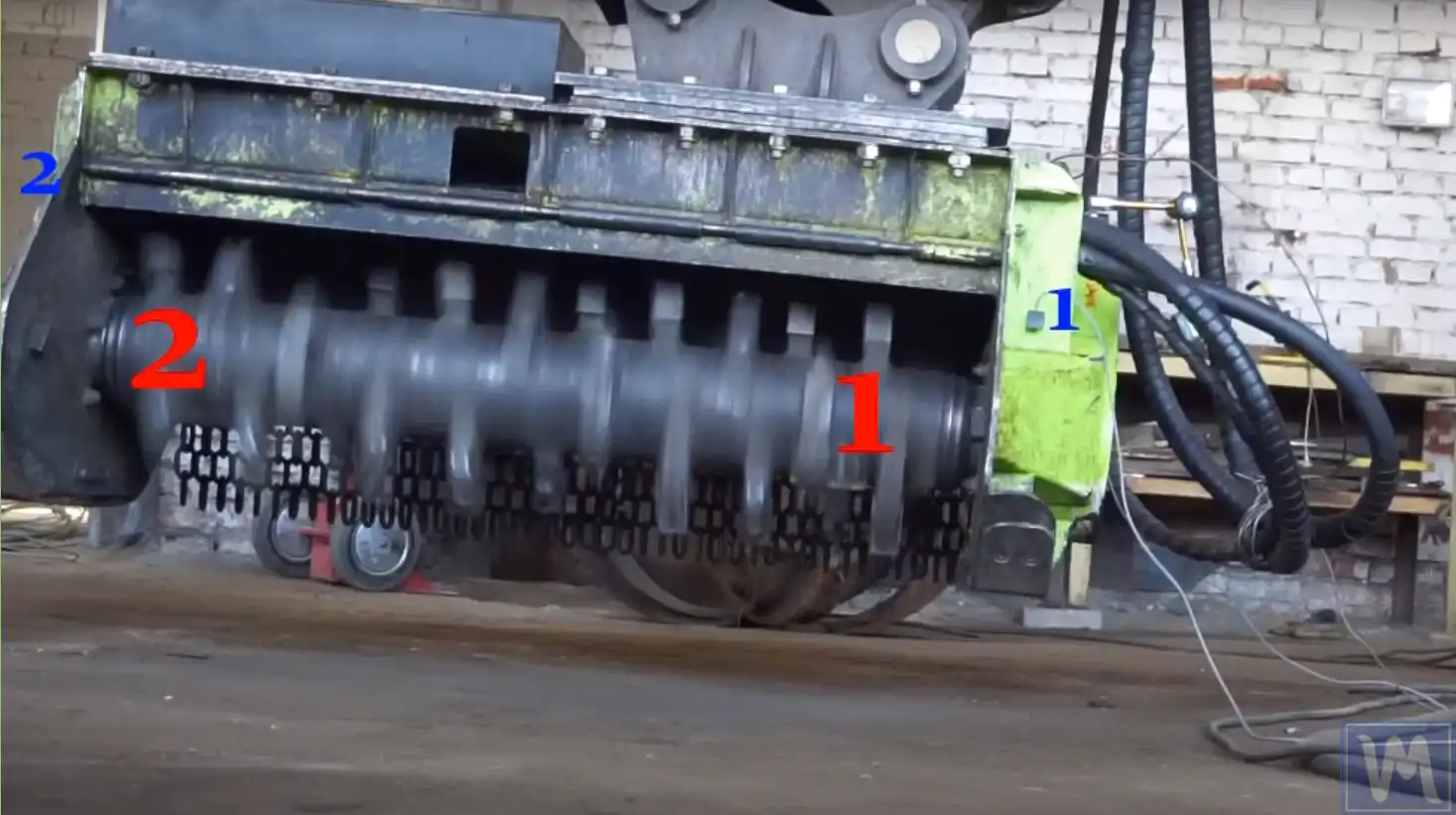
下面的典型示例显示了常见转子配置的校正平面和传感器位置。
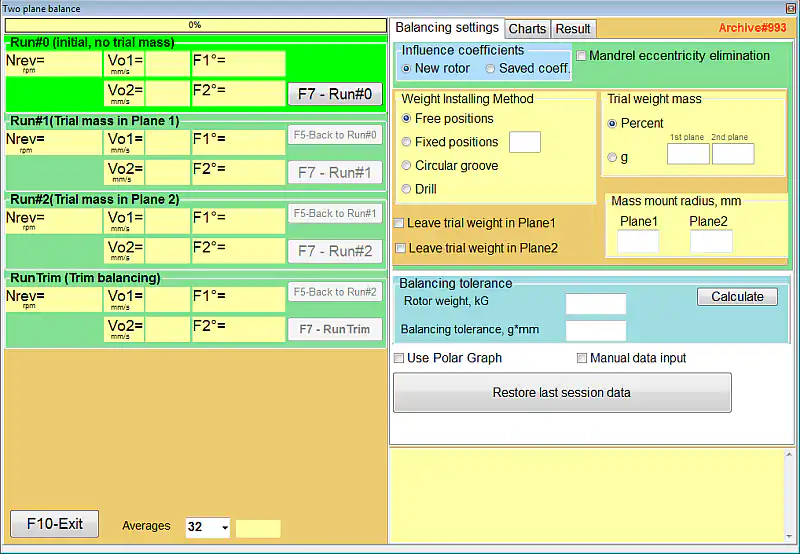
4. 双平面平衡程序
在实际应用中,双平面平衡通常采用 影响系数法. 典型的顺序是:
- 运行 #0: 测量无试验砝码的基线振动(振幅和相位)。
- 运行 #1: install a 试验重量 在第1号平面上,再次测量振动。
- 运行 #2: 将试验砝码移至平面 2,再次测量振动。.
- 计算: 软件会计算平面 1 和平面 2 的校正砝码。
- 更正和核实: 取下试重,安装校正砝码,并进行一次验证运行(微调运行) 以确认结果。
当计算出的修正角位于两个可用的固定点之间时,所需质量可通过以下方式分配到可用位置上: 双平面校正质量分解计算器,并且底层的单平面灵敏度可以通过 影响系数计算器.
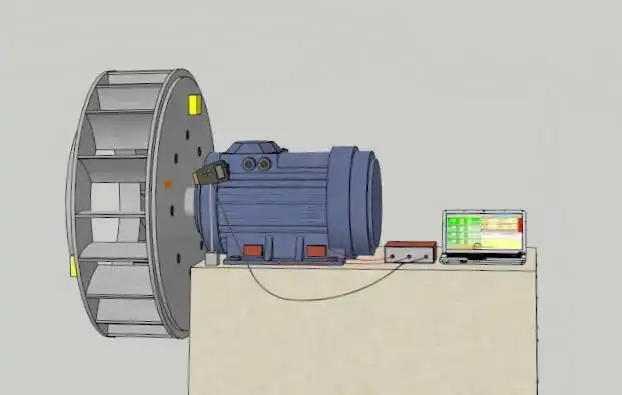
5. 使用 Balanset-1A 实现双平面平衡
Balanset-1A 是一种基于 PC 的双通道平衡系统,设计用于现场条件和生产环境下的单平面和双平面转子平衡。在双平面模式下,Balanset-1A 可测量转子转速以及振动矢量 1x 振动 (均方根值和相位)在两个通道上,并计算两个平面的校正砝码参数。
Because the Balanset-1A 若直接在已安装的机器上使用,该系统可在实际运行条件下进行平衡校正——包括对中、轴承预紧力和地基影响等因素——并报告最终达到的 残余不平衡量 与选定的公差相比,这可以通过 残余不平衡计算器(ISO 21940-11).
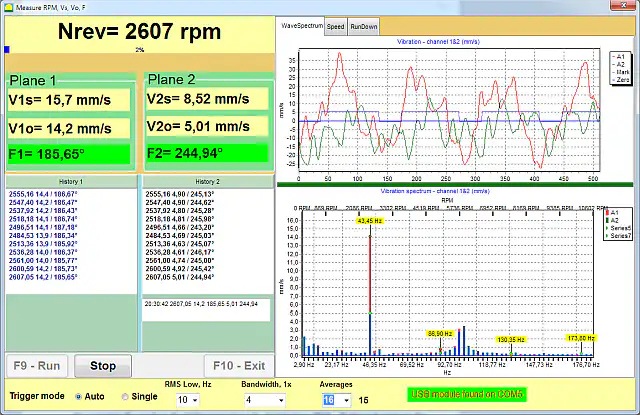
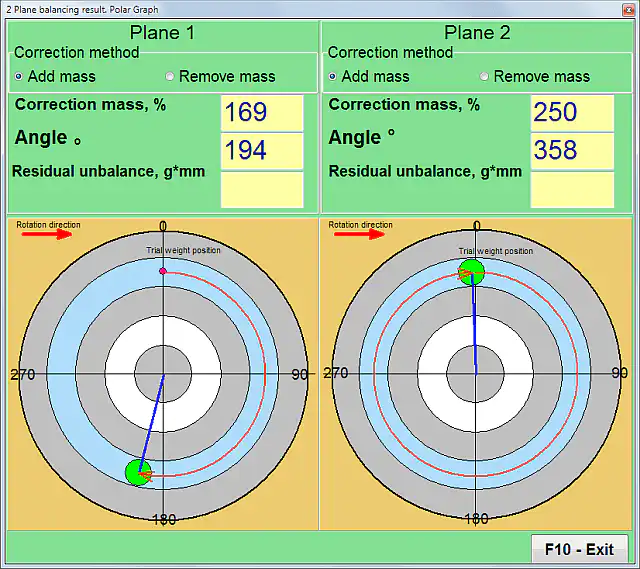
5.1 软件:动态平衡设置和结果视图
5.2 测振仪模式(平衡前的快速检查)
在平衡之前和平衡过程中, 振动计 该模式可用于监测振动,并确认测量时的运行状态是否稳定。