Dynamisk balancering (toplansbalancering) forklaret







1. Definition: Hvad er dynamisk afbalancering?
Dynamisk afbalancering er en procedure til at korrigere ubalance i en rotor ved at foretage massekorrektioner med et minimum af to separate planer langs dens længde. Den bruges, når korrektion i ét plan ikke er nok, fordi rotoren kan kombinere statisk (kraft) ubalance og par ubalance.
2. Statisk vs. dynamisk ubalance: Den vigtigste forskel
For at forstå dynamisk afbalancering er det vigtigt at skelne mellem de to vigtigste former for ubalance.
- Statisk ubalance: Rotorens massemidtpunkt er forskudt i forhold til rotationsaksen. Det opfører sig som et enkelt “tungt punkt” og kan korrigeres med en vægt i et plan.
- Dynamisk ubalance: Ubalancen er fordelt langs rotoren, så det ikke er nok at korrigere i ét plan. Denne tilstand opdages under rotation og kræver korrektioner i to forskellige planer. Dette sker, når en rotor har to lige tunge punkter i hver sin ende, placeret 180° fra hinanden. Denne tilstand er statisk afbalanceret (den ruller ikke til et tungt punkt i hvile), men når den roterer, skaber de to tunge punkter en drejende kraft eller et "par", som får rotoren til at slingre fra ende til anden. Ubalance i parret kan *kun* opdages, når rotoren drejer, og kan *kun* korrigeres ved at placere vægte i to forskellige planer for at skabe et modsatrettet par.


3. Korrektionsplaner og sensorplacering
To-plan-balancering er baseret på tre ting:
- To korrektionsplaner (Plan 1 og Plan 2), hvor korrektionsvægtene skal installeres.
- To målepunkter for vibrationer (typisk i nærheden af lejehuse), der er forbundet med to kanaler.
- En fasereference (omdrejningstæller + reflekterende mærke) til at måle hastighed og fase.
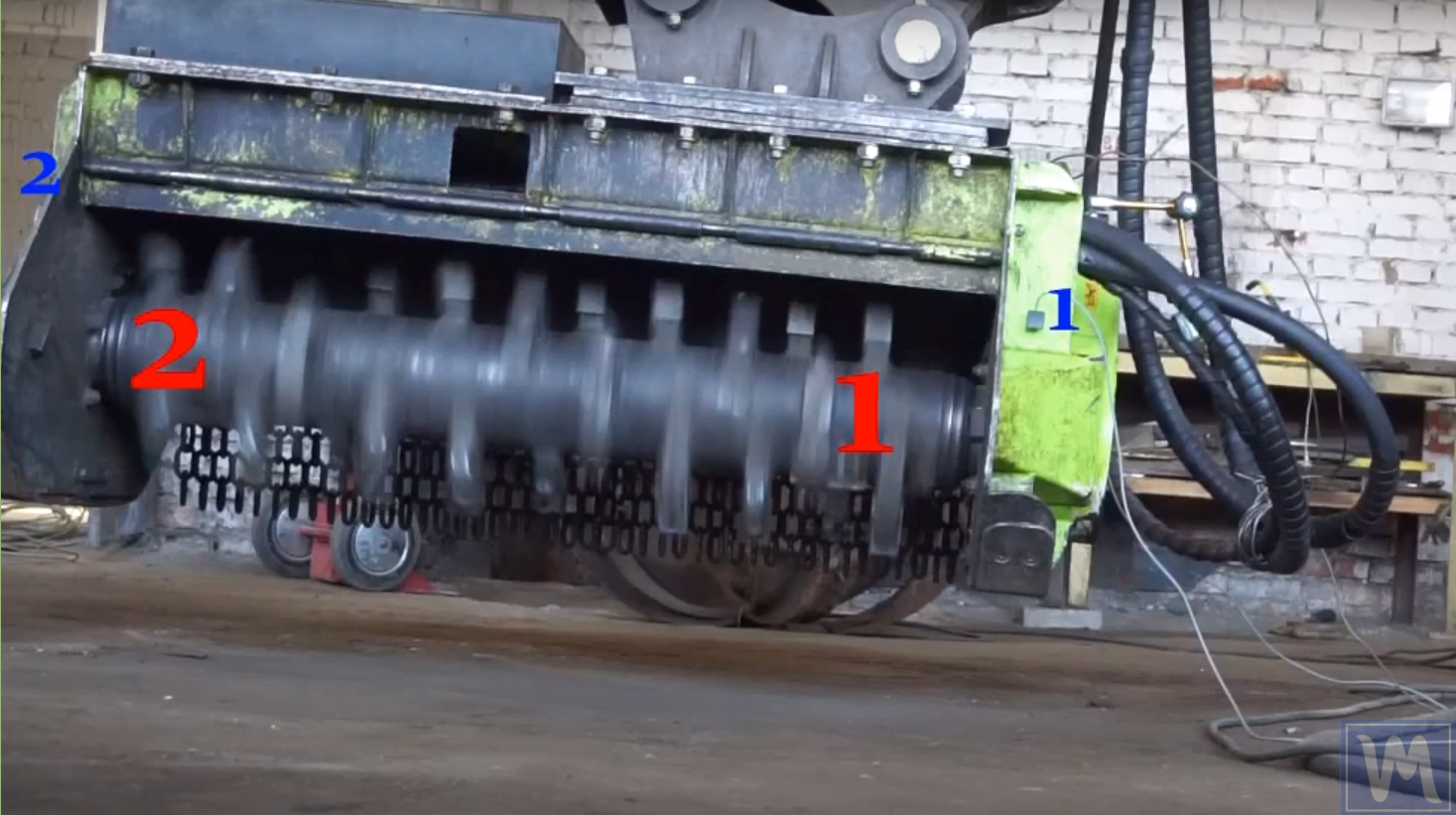
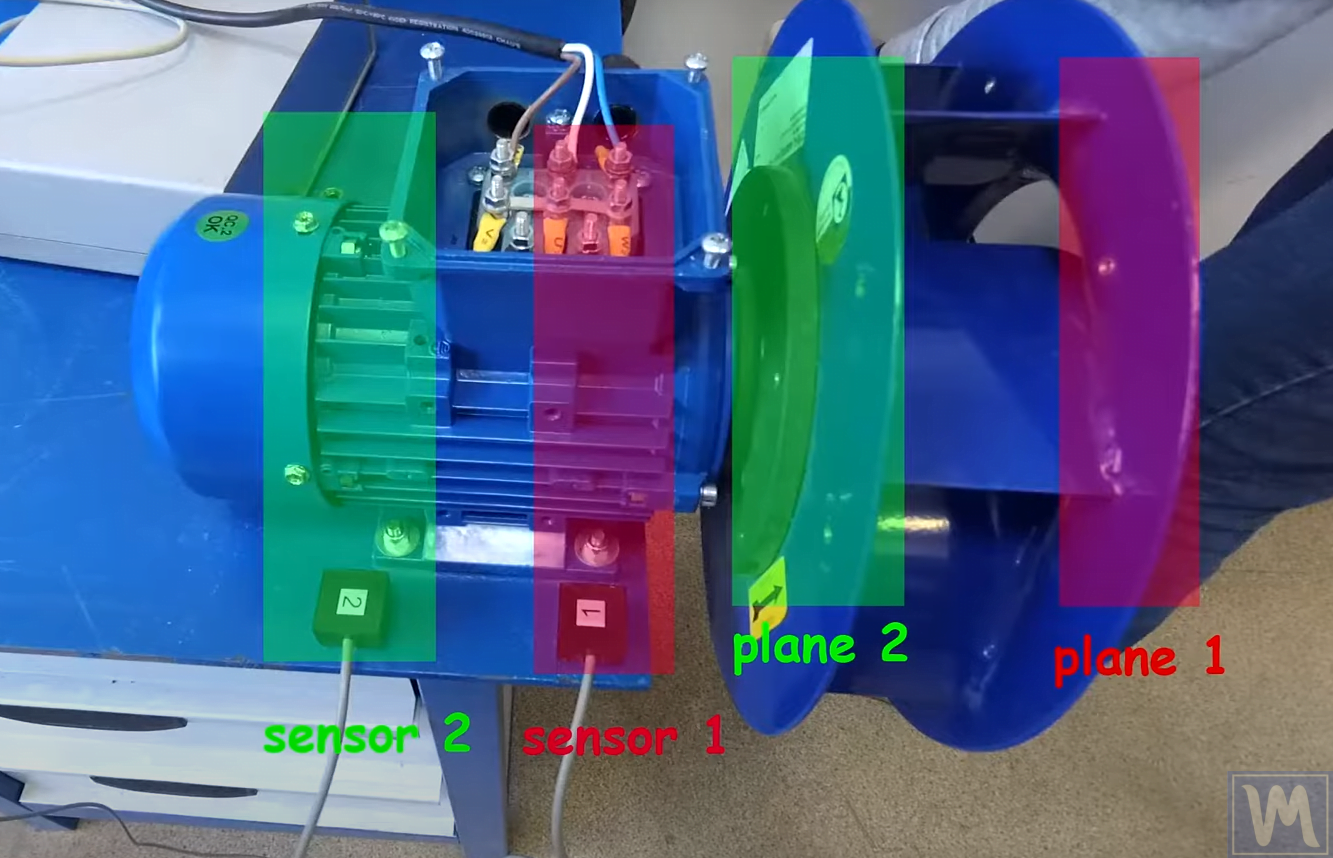
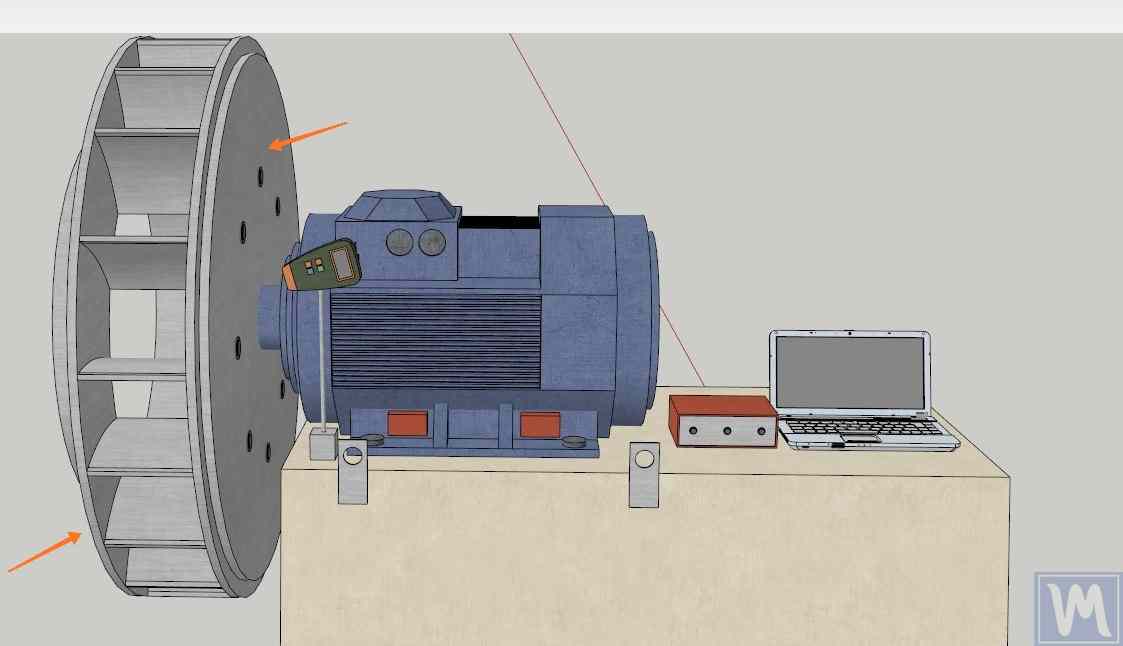
Nedenfor ses typiske eksempler på korrektionsplaner og sensorplacering for almindelige rotorkonfigurationer.

4. Proceduren for afbalancering af to fly
I marken udføres afbalancering i to planer almindeligvis ved hjælp af indflydelseskoefficientmetoden. Den typiske rækkefølge er:
- Kør #0: Mål en baseline-vibration (amplitude og fase) uden forsøgsvægte.
- Kør #1: Installer en prøvevægt i plan 1, og mål vibrationerne igen.
- Kør #2: Flyt prøvevægten til plan 2, og mål vibrationen igen.
- Beregning: softwaren beregner korrektionsvægte for plan 1 og plan 2.
- Korrektion og verifikation: Fjern prøvevægten, installer korrektionsvægte, og udfør en verifikationskørsel (trimkørsel) for at bekræfte resultatet.
5. Balancering i to planer med Balanset-1A
Balanset-1A er et pc-baseret afbalanceringssystem med to kanaler, der er designet til rotorafbalancering i ét og to planer under feltforhold og i produktionsmiljøer. I to-plan-tilstand måler Balanset-1A rotorhastigheden og vektoren af 1x vibration (RMS og fase) på to kanaler og beregner parametre for korrektionsvægt for begge planer.
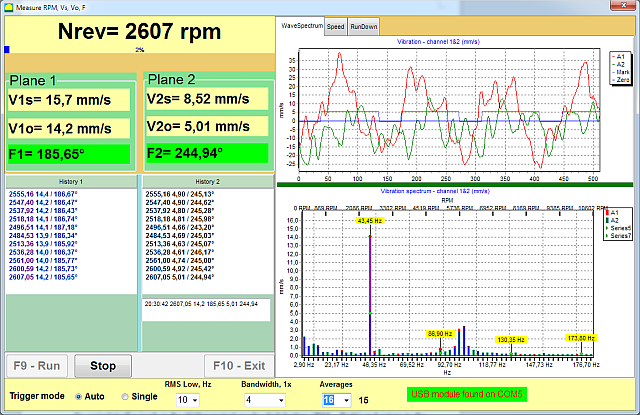
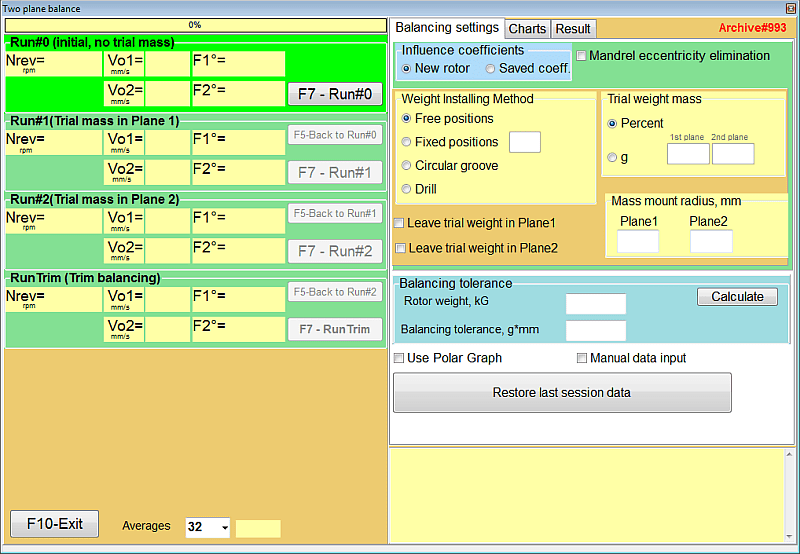
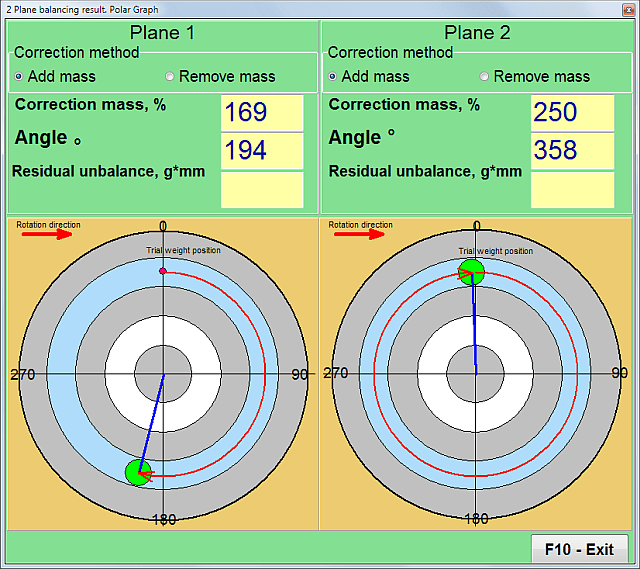
5.1 Software: opsætning af dynamisk afbalancering og resultatvisning
5.2 Vibrometertilstand (hurtig kontrol før afbalancering)
Før og under afbalancering kan Vibrometer-tilstand bruges til at overvåge vibrationer og bekræfte stabile driftsforhold for målinger.