Dünaamiline tasakaalustamine (kahe tasapinna tasakaalustamine) selgitatud







1. Määratlus: Mis on dünaamiline tasakaalustamine?
Dünaamiline tasakaalustamine on protseduur rootori tasakaalustamatuse korrigeerimiseks, tehes massikorrektsioone minimaalselt kaks eraldi lennukit mööda selle pikkust. Seda kasutatakse siis, kui ühe tasandi korrektsioonist ei piisa, sest rootor võib kombineerida staatiline (jõu) tasakaalustamatus ja paari tasakaalutus.
2. Staatiline vs. dünaamiline tasakaalustamatus: Põhiline erinevus
Dünaamilise tasakaalustamise mõistmiseks on oluline eristada kahte peamist tasakaalustamatuse vormi.
- Staatiline tasakaalustamatus: rootori massikeskus on selle pöörlemisteljest nihkes. See käitub nagu üks “raske punkt” ja seda saab korrigeerida ühe raskusega ühes tasapinnas.
- Dünaamiline tasakaalustamatus: tasakaalustamatus jaotub piki rootorit, nii et ühe tasandi korrigeerimisest ei piisa. See tingimus tuvastatakse pöörlemisel ja nõuab korrigeerimist kahes erinevas tasapinnas. See juhtub siis, kui rootori vastaskülgedel on kaks võrdselt rasket punkti, mis asuvad üksteisest 180° kaugusel. Selline seisund on staatiliselt tasakaalustatud (see ei veere raskele kohale, kui see on paigal), kuid kui see pöörleb, tekitavad kaks rasket kohta pöörleva jõu ehk "paari", mis põhjustab rootorile otsast-otsast võnkumise. Paari tasakaalustamatust saab *ainult* tuvastada, kui rootor pöörleb, ja seda saab *ainult* korrigeerida, paigutades raskused kahele eri tasandile, et tekitada vastassuunaline paar.


3. Korrektsioonitasandid ja andurite paigutus
Kahe tasapinna tasakaalustamine põhineb kolmel asjal:
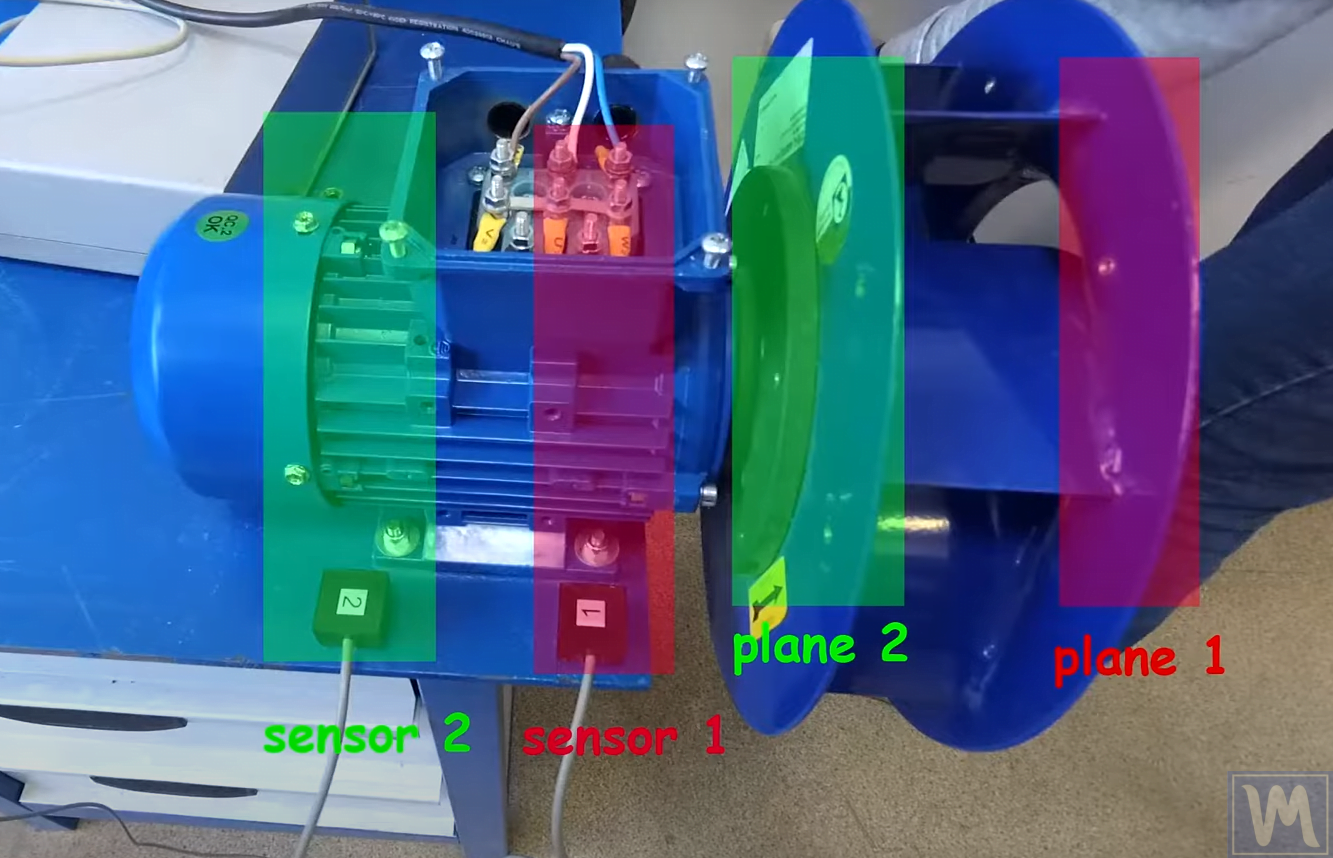
- Kaks korrigeerimistasandit (tasand 1 ja tasand 2), kuhu paigaldatakse paranduskaalud.
- Kaks vibratsiooni mõõtepunkti (tavaliselt laagrikorpuste läheduses), mis on ühendatud kahe kanaliga.
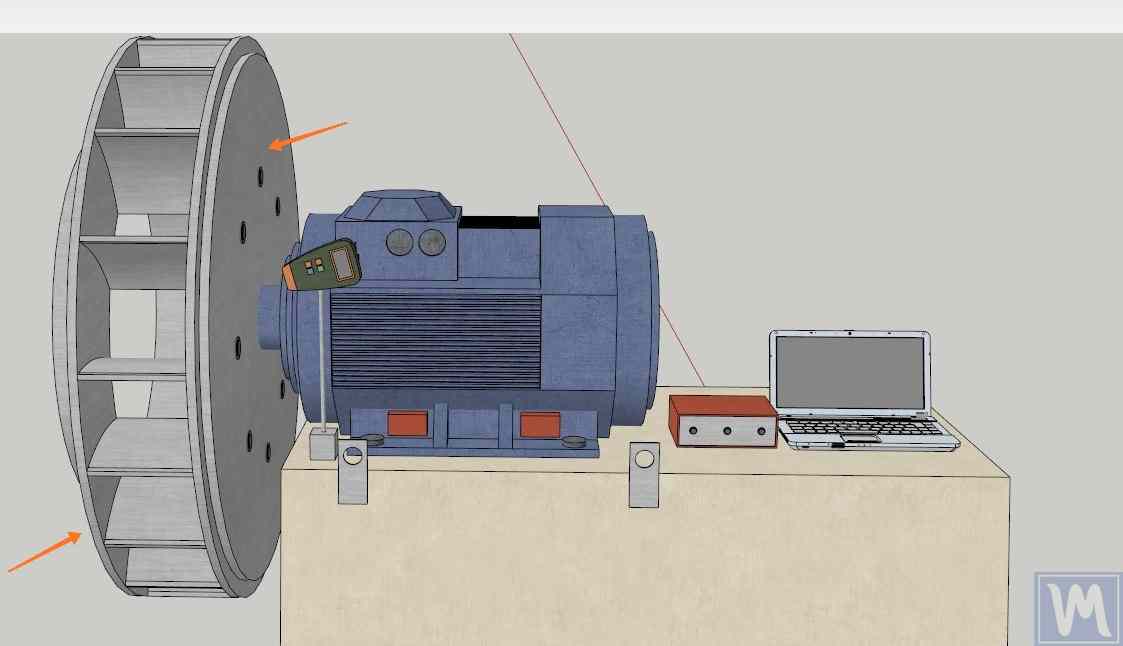
- Faasiviide (tahhomeeter + peegeldav märk) kiiruse ja faasi mõõtmiseks.
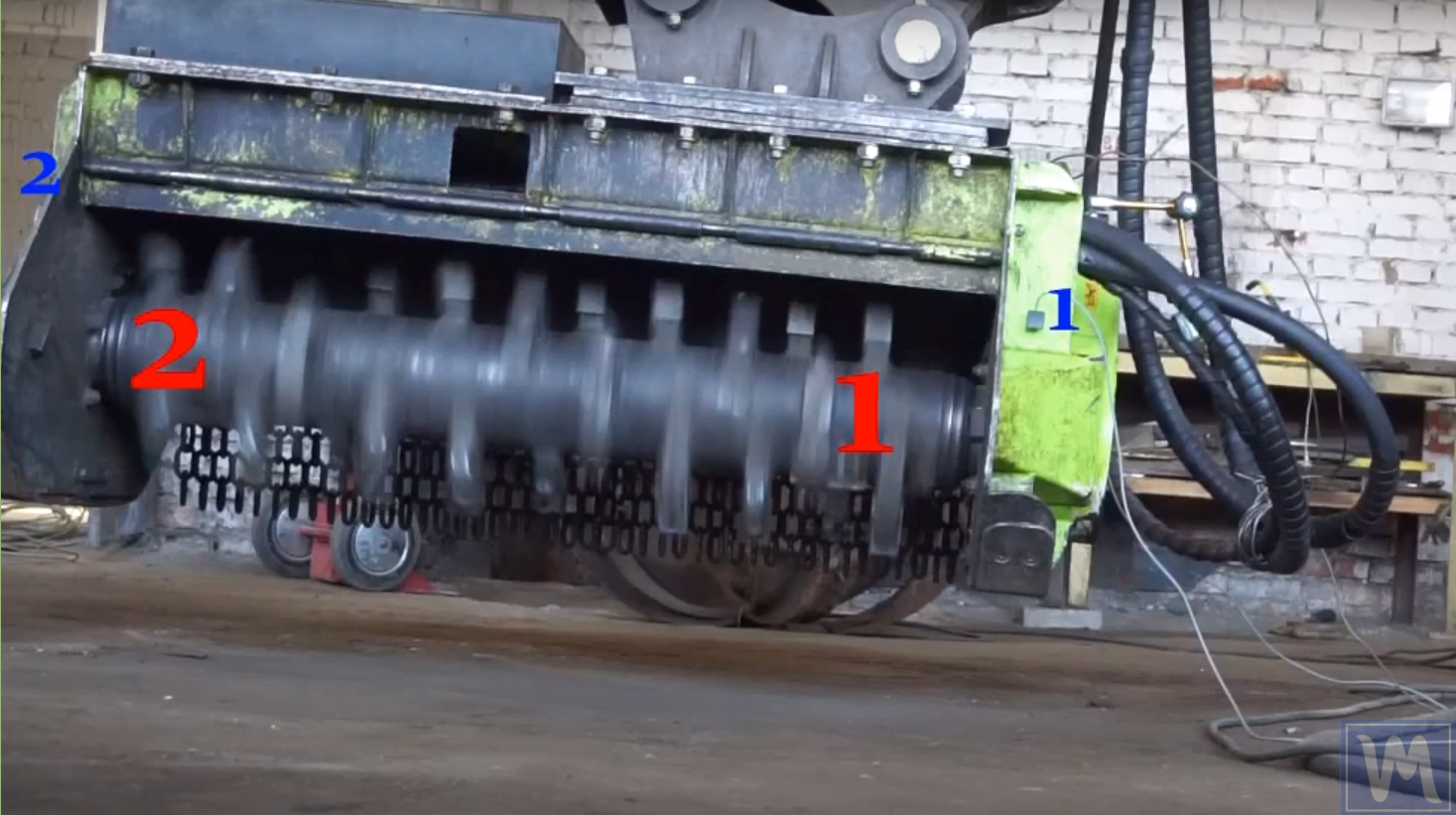
Allpool on esitatud tüüpilised näited, mis näitavad korrektsioonitasandeid ja andurite paigutamist tavaliste rootorkonfiguratsioonide puhul.

4. Kahe tasandi tasakaalustamise menetlus
Kohapeal kasutatakse tavaliselt kahes tasapinnas tasakaalustamist, kasutades mõjutuskoefitsiendi meetodit. Tüüpiline järjestus on järgmine:
- Käivita #0: mõõta baasvibratsiooni (amplituud ja faas) ilma katseraskusteta.
- Käivita #1: paigaldage proovikaal tasandile 1, mõõtke uuesti vibratsiooni.
- Käivita #2: viige katsemass tasandile 2, mõõtke uuesti vibratsiooni.
- Arvutus: tarkvara arvutab tasandite 1 ja 2 korrigeerimiskaalud.
- Korrigeerimine ja kontrollimine: eemaldage proovikaal, paigaldage paranduskaalud ja tehke tulemuse kinnitamiseks kontrollkäik (trimmkäik).
5. Kahe tasandi tasakaalustamine Balanset-1A abil
Balanset-1A on kahe kanaliga PC-põhine tasakaalustussüsteem, mis on mõeldud ühe- ja kahetasandilise rootori tasakaalustamiseks välitingimustes ja tootmiskeskkonnas. Kahe tasandi režiimis mõõdab Balanset-1A rootori kiirust ja vektorit, mis on seotud 1x vibratsioon (RMS ja faas) kahel kanalil ja arvutab mõlema tasandi korrigeerimiskaalu parameetrid.
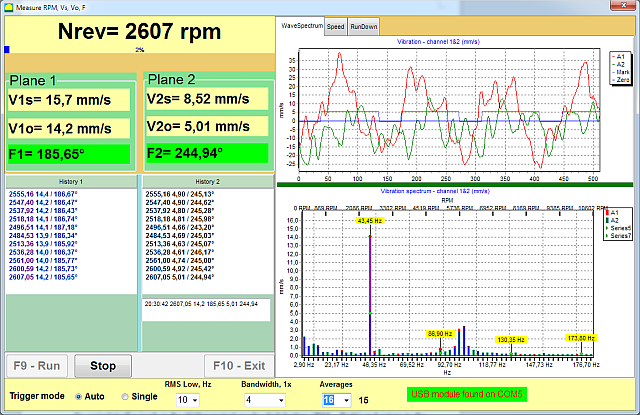
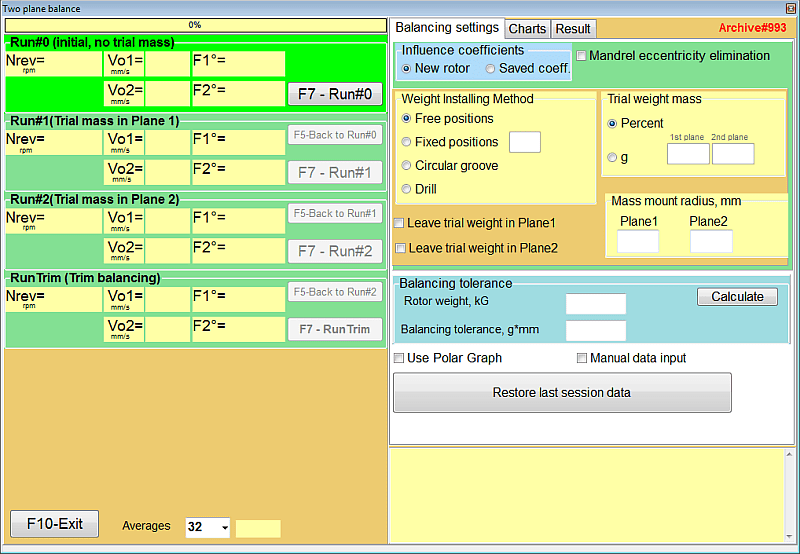
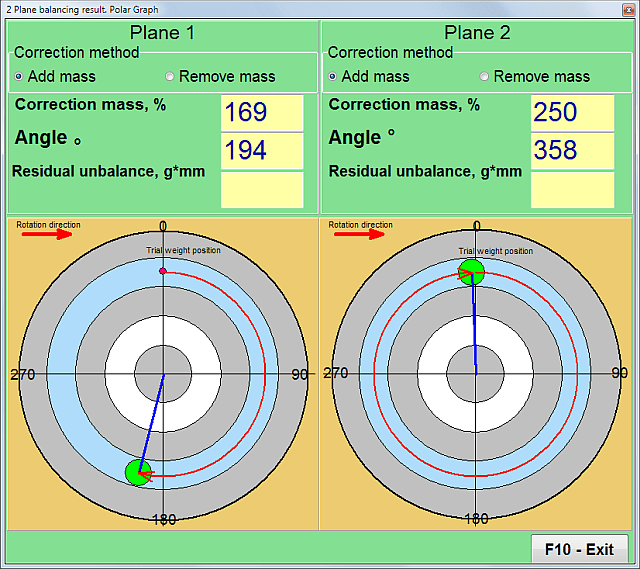
5.1 Tarkvara: dünaamilise tasakaalustamise seadistamine ja tulemuste vaatamine
5.2 Vibromeetri režiim (kiire kontroll enne tasakaalustamist)
Enne tasakaalustamist ja selle ajal saab vibromeetri režiimi kasutada vibratsiooni jälgimiseks ja mõõtmiste stabiilsete töötingimuste kinnitamiseks.