ვიბრომერა.ევუ › ბალანსირების კატალოგი
როტორის დაბალანსების კატალოგი — ადგილზე დაბალანსება ყველა მბრუნავი მანქანისთვის
ამ კატალოგში თითოეული კატეგორია აღწერს, თუ როგორ ვბალანსირებთ კონკრეტული ტიპის როტორს. ადგილზე, საექსპლუატაციო სიჩქარით — Balanset-1A-ს პორტატული ანალიზატორის გამოყენებით. აღჭურვილობის დემონტაჟი, გადაზიდვა და წარმოების შეჩერება არ არის საჭირო — პროცესი სულ რაღაც ორი სენსორის მონტაჟის დროზე მეტხანს არ გრძელდება. ქვემოთ აირჩიეთ თქვენი აღჭურვილობა.

მოკლედ: მბრუნავი როტორის დაბალანსება არის მბრუნავ მანქანაში ნარჩენი მასის დისბალანსის გამოსწორების პროცესი. მისი მონტაჟის ადგილიდან ამოღების გარეშე — როტორი მუშა სიჩქარით ბრუნავს, ხოლო ღერძზე განლაგებული ვიბრაციის სენსორები და ლაზერული ტახომეტრი უსიმეტროობის მდგომარეობას ზომავს. Balanset-1A იყენებს 3-გარბენიანი გავლენის კოეფიციენტების მეთოდს ზუსტი გამოსწორების მასისა და კუთხის გამოსათვლელად, შემდეგ კი შედეგს დოკუმენტურად აფიქსირებს ISO 21940-11 სტანდარტის შესაბამისად. ტიპური სამუშაო ერთ საათზე ნაკლებ დროს მოითხოვს და ვიბრაციას 70%-ით ან მეტით ამცირებს, რითაც საკისრის ექსპლუატაციის ვადას რვა-ათჯერ ზრდის.
მომსახურების სრული კატალოგი
აირჩიეთ თქვენი როტორის ტიპი, რომ იხილოთ ბალანსირების სპეციალური სახელმძღვანელო — სიმპტომები, ეტაპობრივი პროცედურა, დაშვებები, რეალური შემთხვევები და შესაბამისი კალკულატორი.
ვენტილატორები და ჰაერის გადამტანები
ვენტილატორები, დისკები და ქარბერები
სამრეწველო ვენტილატორები, რადიალური იმპელერები, გამწოვი და ჰაერის გადამტენი სარბოლო სიჩქარეზე დაბალანსებული.
სამრეწველო ვენტილატორები (ID / FD)
ინდუცირებული და იძულებითი ნახვევის ქვაბის ვენტილატორები — ორსიბრტყიანი დაბალანსება გაჩერების გარეშე.

ღერძული ვენტილატორები
ლაფეტური და მილ-აქსიალური ვენტილატორები — ფრთის კუთხისა და აწყობის პრობლემების ადგილზე გამოსწორება.

საჰაერო გამწოვი და გამტენი ვენტილატორები
ცხელ, მტვრიან ქვაბის ოთახში ქარის გამწოვი ფანები ადგილზეა დაბალანსებული გათიშვის გარეშე.

გაგრილების კოშკი და გათბობა-ვენტილაციის სისტემის ვენტილატორები
დიდი დაბალი სიჩქარის ვენტილატორები — ამცირებენ ხმაურს, იცავენ გადაცემათა კოლოფებსა და სარტყელებს.
სამრეწველო როტორები
ტუმბოები და იმპელერები
ცენტრიფუგალური და ვაკუუმური ტუმბოს როტორები კავიტაციის, ეროზიის ან ნადების დაგროვების შემდეგ.

სეპარატორები და ცენტრიფუგები
მაღალსიჩქარიანი სეპარატორისა და ცენტრიფუგის როტორები, ადგილზე დაბალანსებული G1.0-მდე.

სამტვრევები და წისქვილები
დამრტყმელი, ყბის და ჩაქუჩის წისქვილების როტორები ცვეთის ან განახლების შემდეგ.
ამძრავებელი ღერძები, რემენები და დამაბრუნებლები
კარდანის/მამილებისა და თასმების ბორბლების დაბალანსება ავტომობილზე ან ადგილზე.

როლები და დრამები
ქაღალდის მანქანის როლები, საფარველის როლები და საპროცესო დრამები.
ტურბინები და ტურბოკომპრესორები
მაღალსიჩქარიანი მოქნილი როტორები — ISO 20816-ის მიხედვით ვიბრაციის შეფასება და დაბალანსება.
ზუსტობა და მაღალი სიჩქარე

CNC-ს შპინდელები და ხელსაწყოების სამაგრები
მაღალსიჩქარიანი ჩარხის სპინდელები წვრილი G2.5 / G1.0 დაბალანსების ხარისხებისთვის.

ელექტროძრავის არმატურები
ძრავის არმატურებისა და როტორული აგლომერატების ადგილზე დაბალანსება ვიბრაციისა და ხმაურის შესამცირებლად.
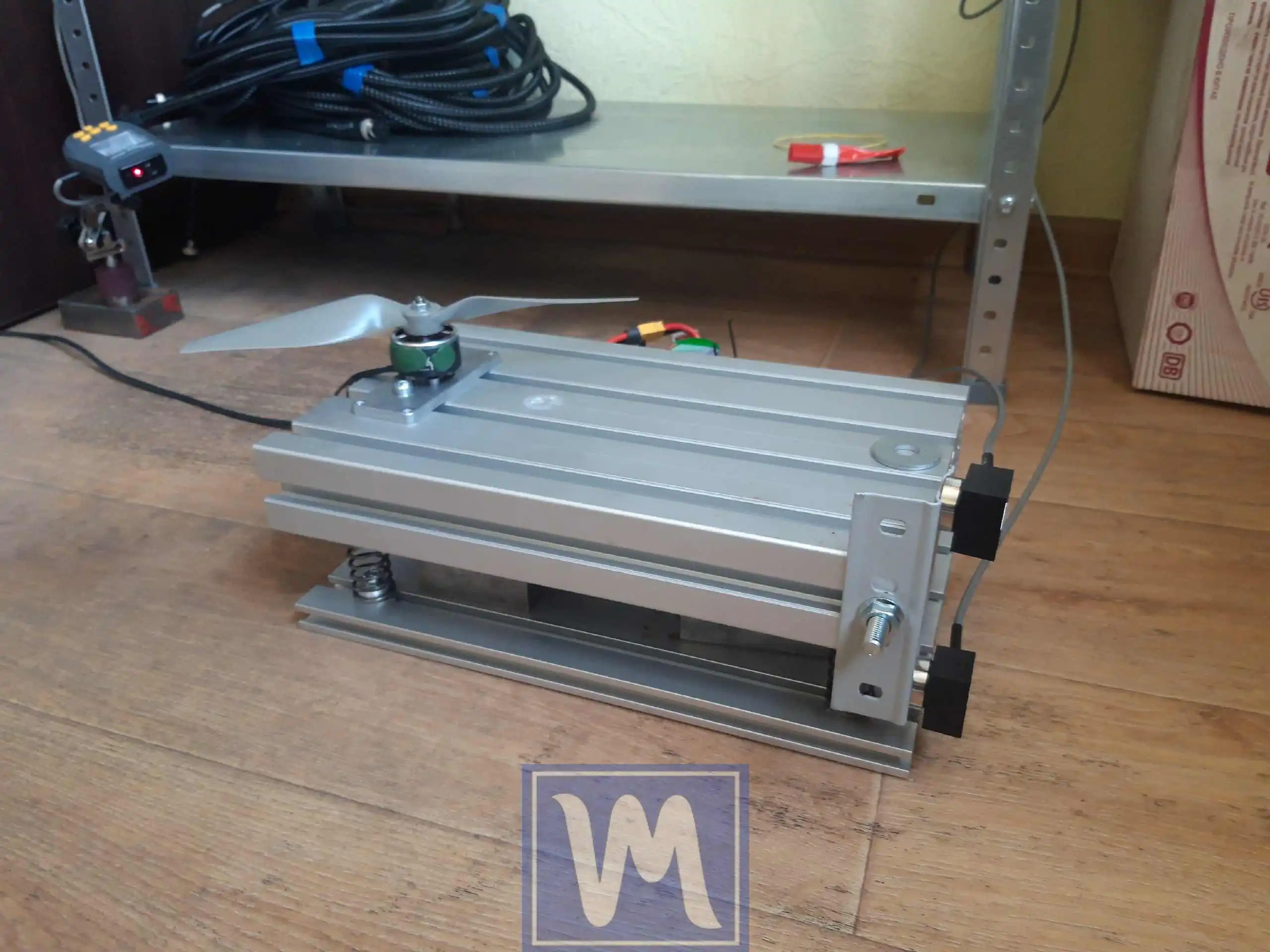
პროპელერები და დრონის როტორები
პროპელერისა და დრონის როტორის დაბალანსება დესტრუქციული ვიბრაციის აღმოსაფხვრელად.
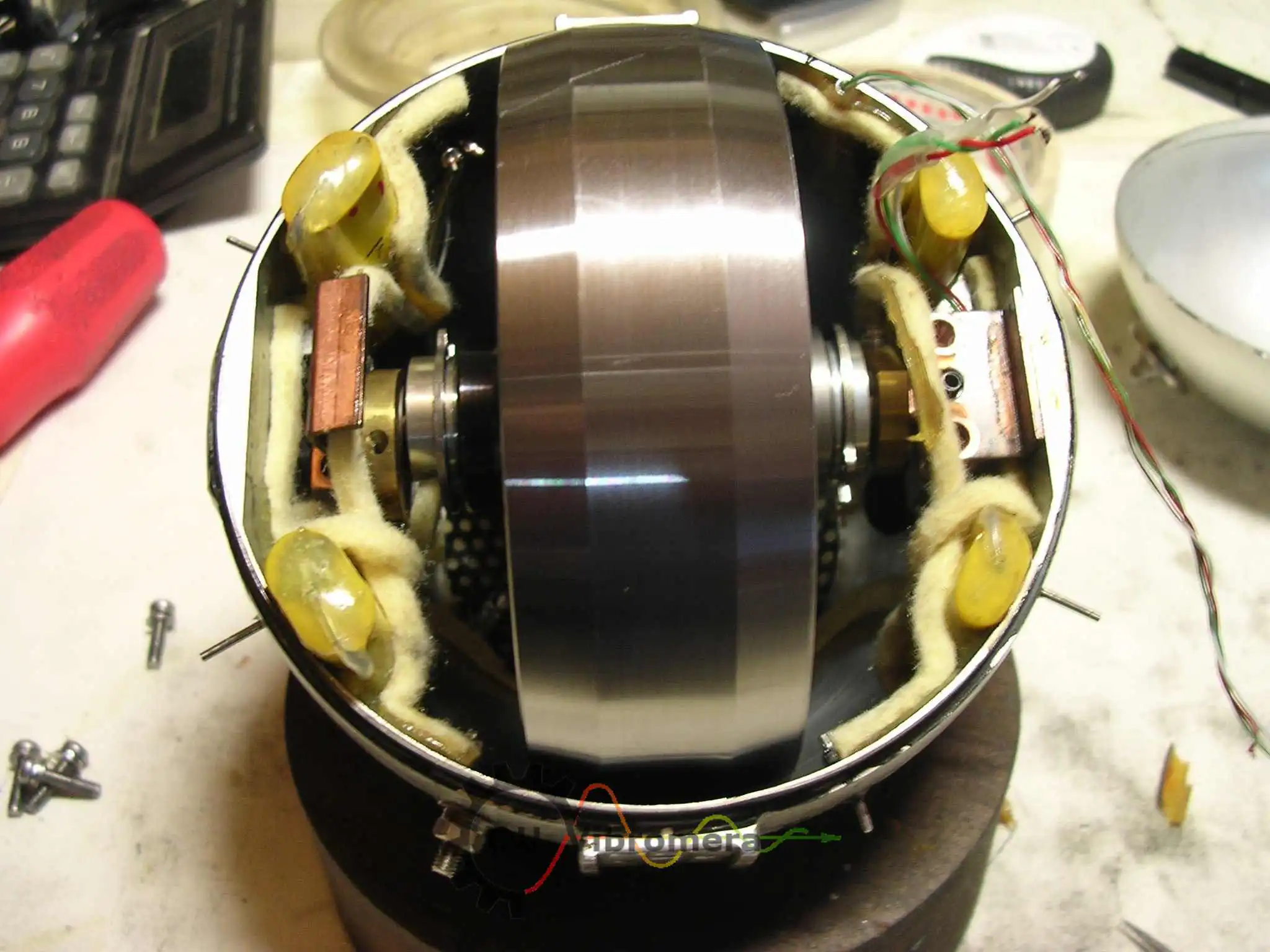
გიროსკოპი
პრეციზიული გიროსკოპის როტორის დაბალანსება მკაცრი კუთხური დაშვებების სტანდარტების მიხედვით.
შეერთებები და დამაბრკოლებლები
ჰიდრავლიკური და მექანიკური შეერთების ბალანსირება ადგილზე.
სასოფლო-სამეურნეო ტექნიკა

სამკრეფები და მკრეფი მანქანები
სამბეჭდი დრამები, ჩოფერები და ვენტილატორები, დაბალანსებული მინდორში მოსავლის აღების სეზონის დაწყებამდე.

მულჩერები და ფრეზები
ტყის მულჩერისა და ფრეზა-კატერის როტორები — დანების გამოცვლის შემდეგ უზრუნველყოფენ ჭრის სისუფთავეს.

ბურღები და ხრახნული კონვეიერები
გრძელი, წვრილი მიმწოდებელი შნეკები და მარცვლეულის ბლოუერის როტორები.
მეთოდები და ინსტრუმენტები
ორპლანიანი (დინამიკური) დაბალანსება
გრძელი როტორები, სადაც დისბალანსი ღერძის გასწვრივ არის განაწილებული — ორიანიანი კორექციის მეთოდის ახსნა.

მანქანის ვიბრაციის აღმოფხვრა
დიაგნოსტიკური მიდგომა — ვიბრაციის წყაროს იდენტიფიცირება და ეტაპობრივად აღმოფხვრა.
ვიბრაციის ანალიზატორი და FFT
Balanset-1A-ს გამოყენება, როგორც დამოუკიდებელი FFT სპექტრული ანალიზატორი დიაგნოსტიკისთვის.

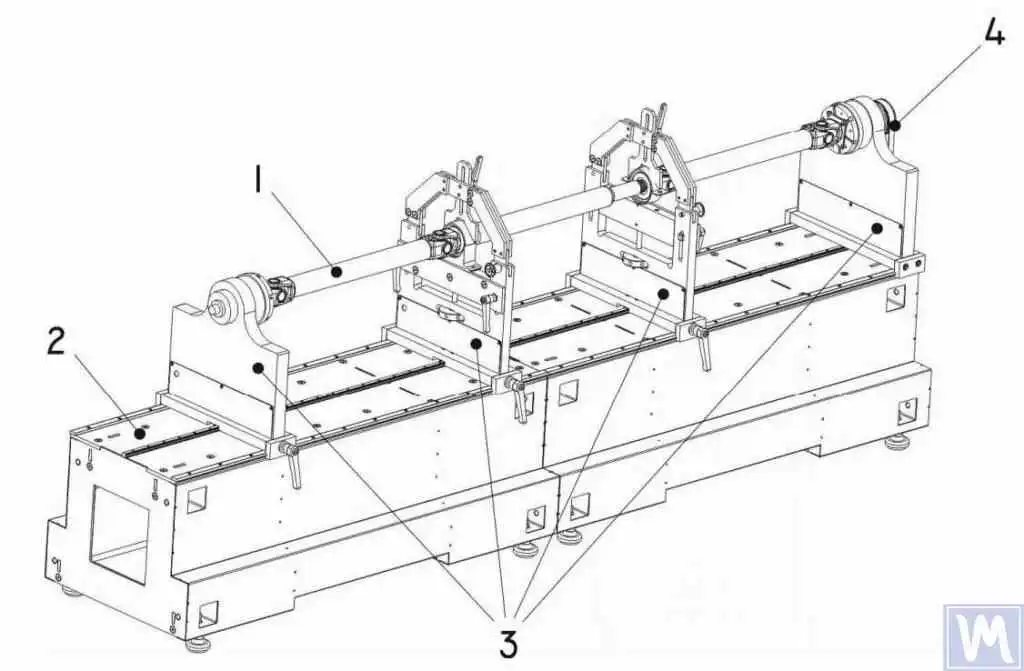
ბალანსირების მანქანა პორტატული ნაკრების წინააღმდეგ
როდის არის სახელოსნოს დანადგარი საუკეთესო არჩევანი და როდის სჯობს პორტატული ანალიზატორი.

შეიძინეთ პორტატული ბალანსერი
სრული ნაკრები, ფასი, მიწოდება და რას უნდა ელოდოთ — სრული სახელმძღვანელო ყიდვისთვის.
ბალანსეტ-1A და ალტერნატივები
სხვა პორტატულ საბალანსო ინსტრუმენტებთან გულწრფელი შედარება.

ძველი სასწორის განახლება
მოძველებული საამქრო დანადგარის ელექტრონიკის შეცვლა თანამედროვე USB საზომი მოწყობილობით.
საველე ბალანსირების სახელმძღვანელო
სრული პრაქტიკული სახელმძღვანელო — თეორია, პრაქტიკა და ამოცანების გადაჭრა Balanset-1A-სთან ერთად.
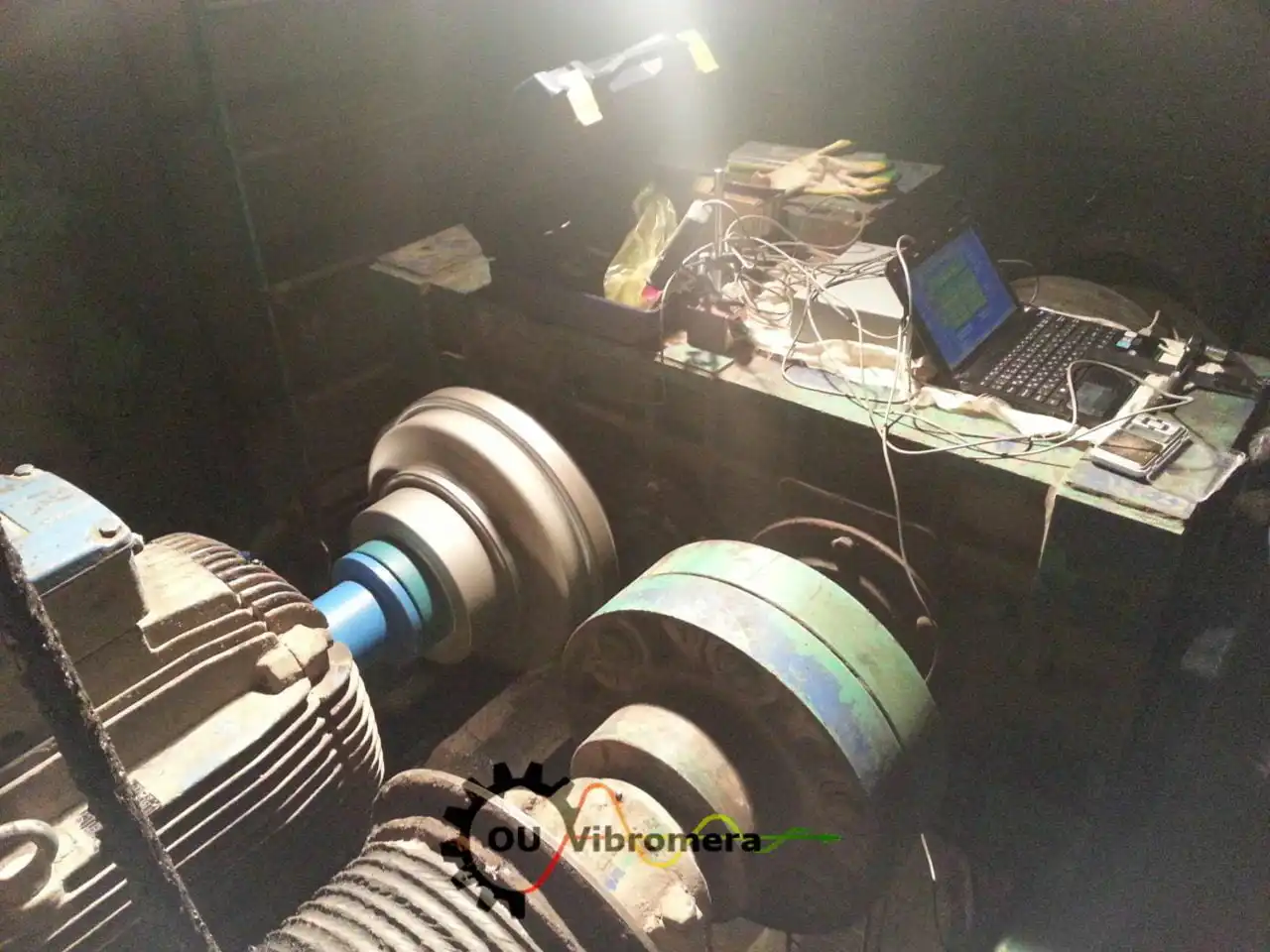
რატომ ადგილზე (in-situ) დაბალანსება?
ტრადიციული როტორის დაბალანსება მოითხოვს დანადგარის ხაზიდან გამოყვანას, სახელოსნოში გადაზიდვასა და ხელახლა მონტაჟს — რაც მუშაობის მრავალდღიან შეჩერებას იწვევს. ადგილზე დაბალანსება ამ პროცესს ამცირებს სენსორის მონტაჟამდე და ექსპლუატაციის სიჩქარით ორ-სამ საზომ სეანსამდე:
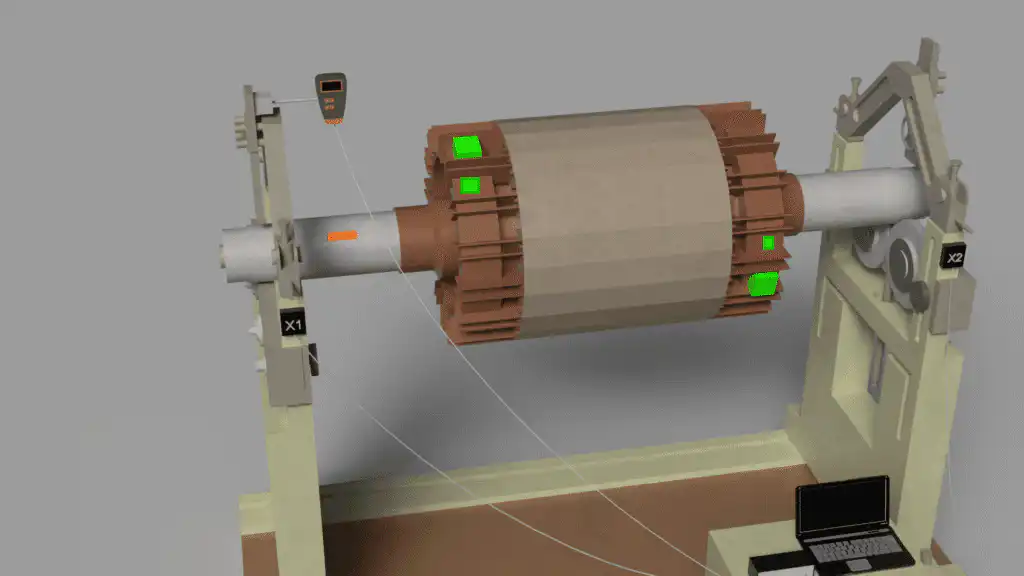
როგორ მუშაობს საველე დაბალანსება — უნივერსალური პროცესი
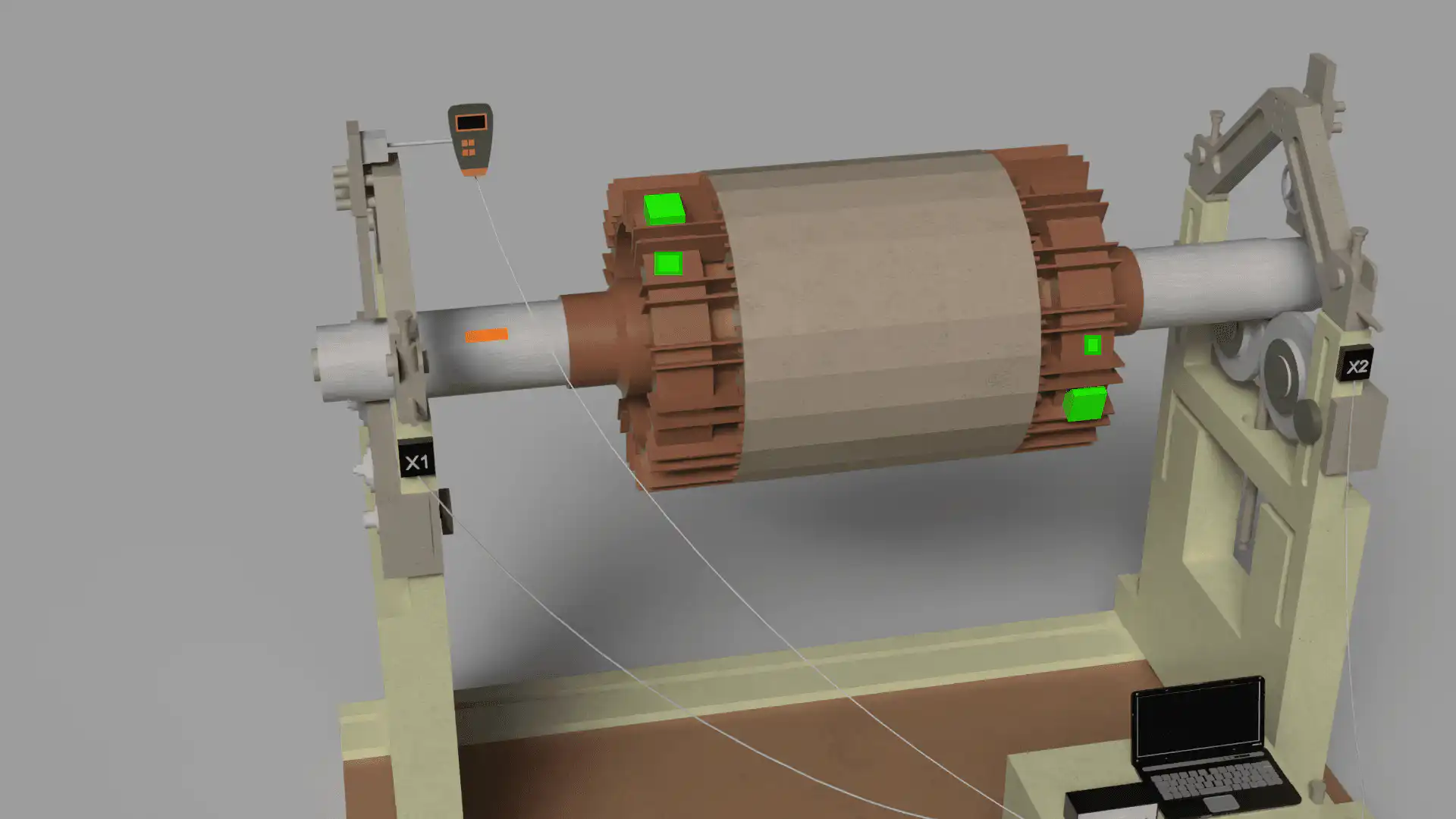
როტორის ტიპის მიუხედავად, Balanset-1A-თი ველში ბალანსირების ყველა სამუშაო იგივე სისტემური გავლენის კოეფიციენტების პროცედურას მიჰყვება:
- დაამონტაჟეთ სენსორები. ვიბრაციული აჩქარების სენსორი მაგრდება საკისრის კორპუსზე, ხოლო ლაზერული ტახომეტრი მიიმართება ლილვზე არსებულ ასახველ ზოლზე. დაშლა არ არის საჭირო.
- დააფიქსირეთ საწყისი მაჩვენებელი. ერთი გაშვება სრული საექსპლუატაციო სიჩქარით იღებს ვიბრაციის ამპლიტუდსა და ფაზურ კუთხეს, რითაც განისაზღვრება დენის არათანაბრობის ვექტორი.
- დაამატეთ საცდელი წონა. ცნობილი მასა დროებით დამაგრებულია ცნობილ კუთხოვან მდებარეობაზე. მეორე საზომი პროცესი განსაზღვრავს როტორის მგრძნობელობას — გავლენის კოეფიციენტს.
- გაანგარიშეთ კორექცია. პროგრამა Balanset-1A იყენებს გავლენის კოეფიციენტის ალგორითმს ერთი ან ორივე სიბრტყისთვის ზუსტი გამოსწორების მასისა და კუთხის გამოსათვლელად.
- გამოასწორეთ. გათვლილი მასა შედუღებული, დაბოლტირებული ან დაჭერილია მითითებულ პოზიციაზე. საცდელი წონა მოხსნილია, თუ ის გადაწყვეტის ნაწილს არ წარმოადგენს.
- დაადასტურეთ და დოკუმენტირეთ. საბოლოო გაზომვის ციკლი ადასტურებს, რომ ნარჩენი არაბალანსი შეესაბამება ISO-ს მოთხოვნილ კლასს. მოწყობილობა ქმნის ბეჭდვისთვის მზა საბალანსო ანგარიშს.
ბალანსეტ-1A — თქვენი სრული მოწყობილობა საველე დაბალანსებისთვის
ამ კატალოგში არსებული ყველა მომსახურება სრულდება ერთი პორტატული ინსტრუმენტით: ბალანსეტი-1ა. ეს არის ორარხიანი დინამიკური ბალანსერი და ვიბრაციის ანალიზატორი, რომელიც აბალანსებს მყარ როტორებს. თავიანთ ბრუნვაში, საექსპლუატაციო სიჩქარით, 3-წერტილიანი გავლენის კოეფიციენტების მეთოდის გამოყენებით — პროგრამული უზრუნველყოფა ითვლის ზუსტ საკორექციო მასასა და კუთხეს და ინახავს ანგარიშს.
რა შედის სრულ კომპლექტში
1,975 ევრო · სრული ნაკრები, მარაგშია, დღგ-ს ინვოისი
- ინტერფეისის საზომი ბლოკი (USB, 2 არხი)
- ორი ვიბრაციული აჩქარების სენსორი (4 მ-იანი კაბელი, 10 მ-იანი დამატებით)
- ლაზერული ტაქომეტრი / ოპტიკური ფაზის სენსორი (50–500 მმ)
- მაგნიტური სადგამი სენსორისთვის
- ციფრული სასწორი საცდელი და საკორექციო წონებისთვის
- Windows-ის დაბალანსებისა და ანალიზის პროგრამული უზრუნველყოფა
- პლასტმასის სატრანსპორტო კონტეინერი
სრული კომპლექტი
ბლოკი · 2 სენსორი · ლაზერული ტაქომეტრი · მაგნიტური სადგამი · ციფრული სასწორი · პროგრამული უზრუნველყოფა · ტრანსპორტირების ჩანთა. ყველაფერი, რაც ბალანსირების დასაწყებად გჭირდებათ, მოჰყვება კომპლექტში.
ორიგინალი კომპლექტი
ბლოკი · 2 სენსორი · ლაზერული ტახომეტრი · პროგრამული უზრუნველყოფა. ინტეგრატორებისთვის, რომლებსაც უკვე აქვთ სტენდი, სასწორი და კორპუსი, ან რომლებიც ბლოკს ბალანსირების მანქანაში ათავსებენ.
| პარამეტრი | ღირებულება |
|---|---|
| გაზომვის არხები | 2 (ერთი და ორპლანიანი დაბალანსება) |
| ვიბრაციის სიჩქარის დიაპაზონი | 0.2–80 mm/s RMS |
| სიხშირის დიაპაზონი | 5–1000 Hz (≤10% ამპლიტუდის ცდომილება 550 Hz-ის ზემოთ) |
| ზუსტობა | სრული მასშტაბის ±5% |
| მეთოდი | 3-ქულიანი გავლენის კოეფიციენტი (1 ან 2 სიბრტყე) |
| ანალიზი | ამპლიტუდა და ფაზა 1×-ზე, FFT სპექტრი და ტალღის ფორმა, შენახული ანგარიშები |
| ლეპტოპი | არ შედის (Windows PC, ხელმისაწვდომია მოთხოვნის შემთხვევაში) |
სტანდარტები, რომლებითაც ვმუშაობთ
ISO 21940-11 (ყოფილი ISO 1940-1) განსაზღვრავს მყარი როტორის ბალანსის ხარისხის კლასებს G0.4-დან G4000-მდე. ნებადართული ნარჩენი არაბალანსი კონკრეტული კლასისთვის არის ე = G × 9549 / n (გ·მმ/კგ), სადაც n არის ლილვის სიჩქარე ბრუნ/წთ-ში. როტორის ტიპის მიხედვით ტიპური კლასები:
- G0.4 – G1.0 — გიროსკოპები, ზუსტი სახეხი ღერძები, სტომატოლოგიური ტურბინები
- G2.5 — CNC სპინდლები, ცენტრიფუგალური ტუმბოს იმპელერები, გაზტურბინის როტორები
- G6.3 — ცენტრიფუგალური ვენტილატორები, სამრეწველო ტუმბოს რგოლები, სტანდარტული ელექტროძრავები
- G16 — სასოფლო-სამეურნეო ტექნიკა, კარდანის ამძრავები, საფქვავები
- G40 — კომბინირებული წისქვილები, დიდი დამაბრუებლები
ISO 20816 (ვიბრაციის სიმძიმე) და ISO 14694 (სამრეწველო ვენტილატორები) ადგენს ადგილზე ვიბრაციის ზღვრულ მნიშვნელობებს, რომლებითაც ფასდება დაბალანსების შედეგი უშუალოდ დანადგარზე. API 610 არეგულირებს ნახშირწყალბადურ მომსახურებაში მყოფ ცენტრიდანულ ტუმბოებს (მაქს. ნარჩენი დისბალანსი თითო საკორექციო სიბრტყეზე Umax = 6350W/N g·mm, სადაც W არის იმ სიბრტყისთვის ყელის სტატიკური დატვირთვა kg-ში, ხოლო N არის მაქსიმალური უწყვეტი სიჩქარე rpm-ში; ეკვივალენტური იმპერიული ფორმაა 4W/N oz·in, სადაც W მოცემულია lb-ში). ნარჩენი დისბალანსის ყველა მნიშვნელობა დოკუმენტირდება დაბალანსების ანგარიშში.
გამოიყენეთ ჩვენი ნარჩენი არათანაბრობის კალკულატორი როტორის დასაშვები ტოლერანტობის დასადგენად დაწყებამდე, ან საკისრის სამუშაო ხნის კალკულატორი რომ ნახოთ, ცხოვრების რაოდენობას აღიდგენთ დისბალანსის გამოსწორებით.
უფასო დაბალანსების კალკულატორები
ისწავლე თეორია
ხელის აბალანსირების ხშირად დასმული კითხვები
რა არის ადგილზე (in-situ) როტორის დაბალანსება?
რომელი როტორების დაბალანსებაა შესაძლებელი ადგილზე?
რა ხანგრძლივობა აქვს საველე დაბალანსების სამუშაოს?
მჭირდება თუ არა სპეციალური მომზადება Balanset-1A-ს გამოსაყენებლად?
ერთსიბრტყიანი თუ ორსიბრტყიანი დაბალანსება — როგორ ავირჩიო?
რა სიზუსტეს აღწევს ადგილზე დაბალანსება?
როტორის ბალანსირება — ადგილზე, საექსპლუატაციო სიჩქარით
Balanset-1A უზრუნველყოფს ერთ- და ორმხრივი ველის დაბალანსებას ამ კატალოგში არსებული ყველა ტიპის როტორისთვის. ერთი პორტატული ნაკრები, ერთი სისტემური მეთოდი, ISO-სტანდარტით დოკუმენტირებული შედეგები. იგზავნება პორტუგალიიდან DHL-ის მეშვეობით 1–3 დღეში.