Dinamikus kiegyensúlyozás (két síkú kiegyensúlyozás) magyarázata







1. Meghatározás: Mi a dinamikus kiegyensúlyozás?
Dinamikus kiegyensúlyozás egy eljárás a rotor kiegyensúlyozatlanságának korrigálására tömegkorrekciók elvégzésével legalább két különálló repülőgép hosszában. Ezt akkor használják, ha az egy síkban történő korrekció nem elegendő, mert a rotor kombinálni tudja statikus (erő) kiegyensúlyozatlanság és pár egyensúlyhiány.
2. Statikus vs. dinamikus kiegyensúlyozatlanság: A legfontosabb különbség
A dinamikus kiegyensúlyozás megértéséhez fontos megkülönböztetni a kiegyensúlyozatlanság két fő formáját.
- Statikus kiegyensúlyozatlanság: a rotor tömegközéppontja eltolódik a forgástengelyétől. Úgy viselkedik, mint egyetlen “nehéz pont”, és egyetlen síkban lévő súllyal korrigálható.
- Dinamikus kiegyensúlyozatlanság: a kiegyensúlyozatlanság a rotor mentén oszlik el, így az egy síkban történő korrekció nem elegendő. Ezt az állapotot a forgás során észlelik, és két különböző síkban történő korrekciót igényel. Ez akkor fordul elő, ha a rotor két egyenlő nehéz foltja van az ellentétes végeken, egymástól 180°-os távolságra. Ez az állapot statikusan kiegyensúlyozott (nyugalmi állapotban nem gördül a nehéz pontra), de amikor forog, a két nehéz pont olyan elforgató erőt, vagy "párost" hoz létre, amely a rotor végét-fejét megingatja. A pár kiegyensúlyozatlanság *csak* akkor észlelhető, amikor a rotor forog, és *csak* úgy lehet korrigálni, hogy a súlyokat két különböző síkban helyezzük el, hogy ellentétes párat hozzunk létre.


3. Korrekciós síkok és érzékelők elhelyezése
A kétsíkú kiegyensúlyozás három dologra épül:
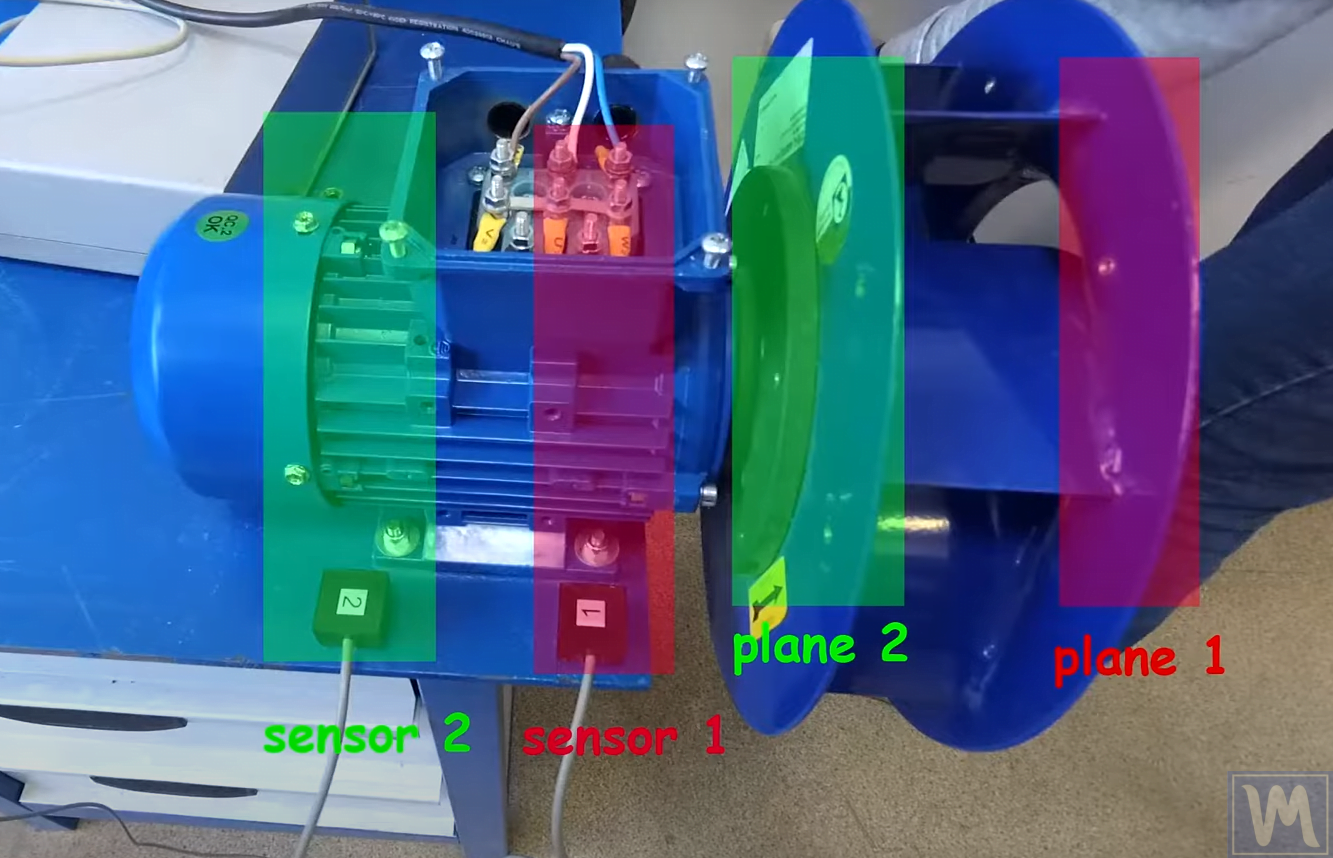
- Két korrekciós sík (1. és 2. sík), ahová a korrekciós súlyokat telepítik.
- Két rezgésmérő pont (jellemzően csapágyházak közelében) két csatornához csatlakozik.
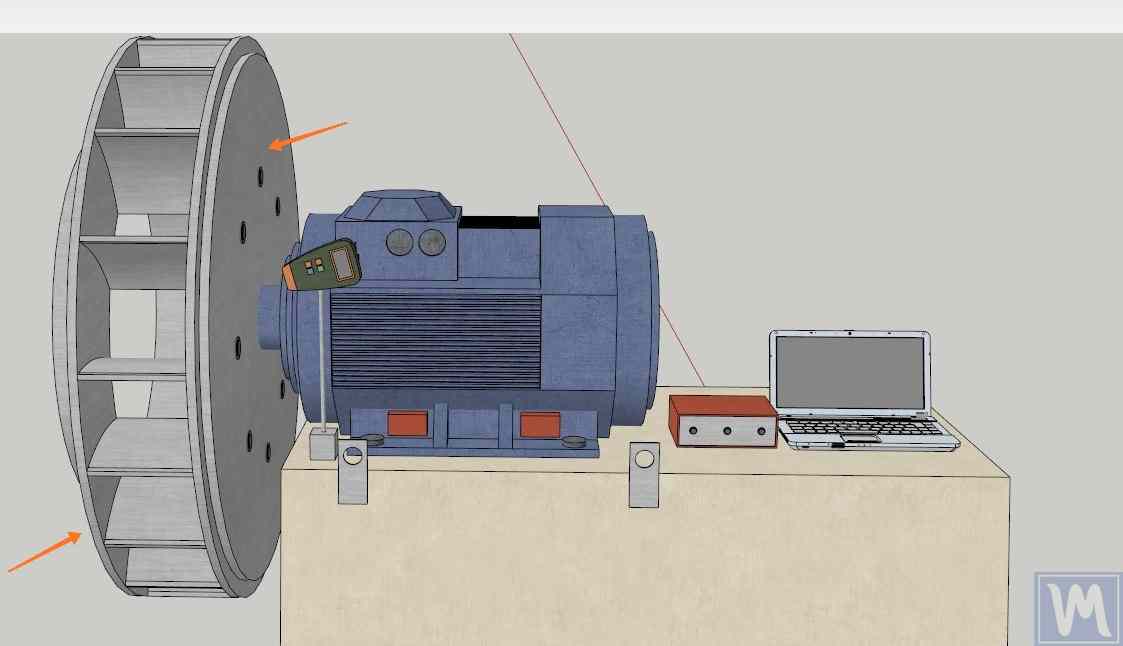
- A fázisreferencia (fordulatszámmérő + fényvisszaverő jel) a sebesség és a fázis mérésére.
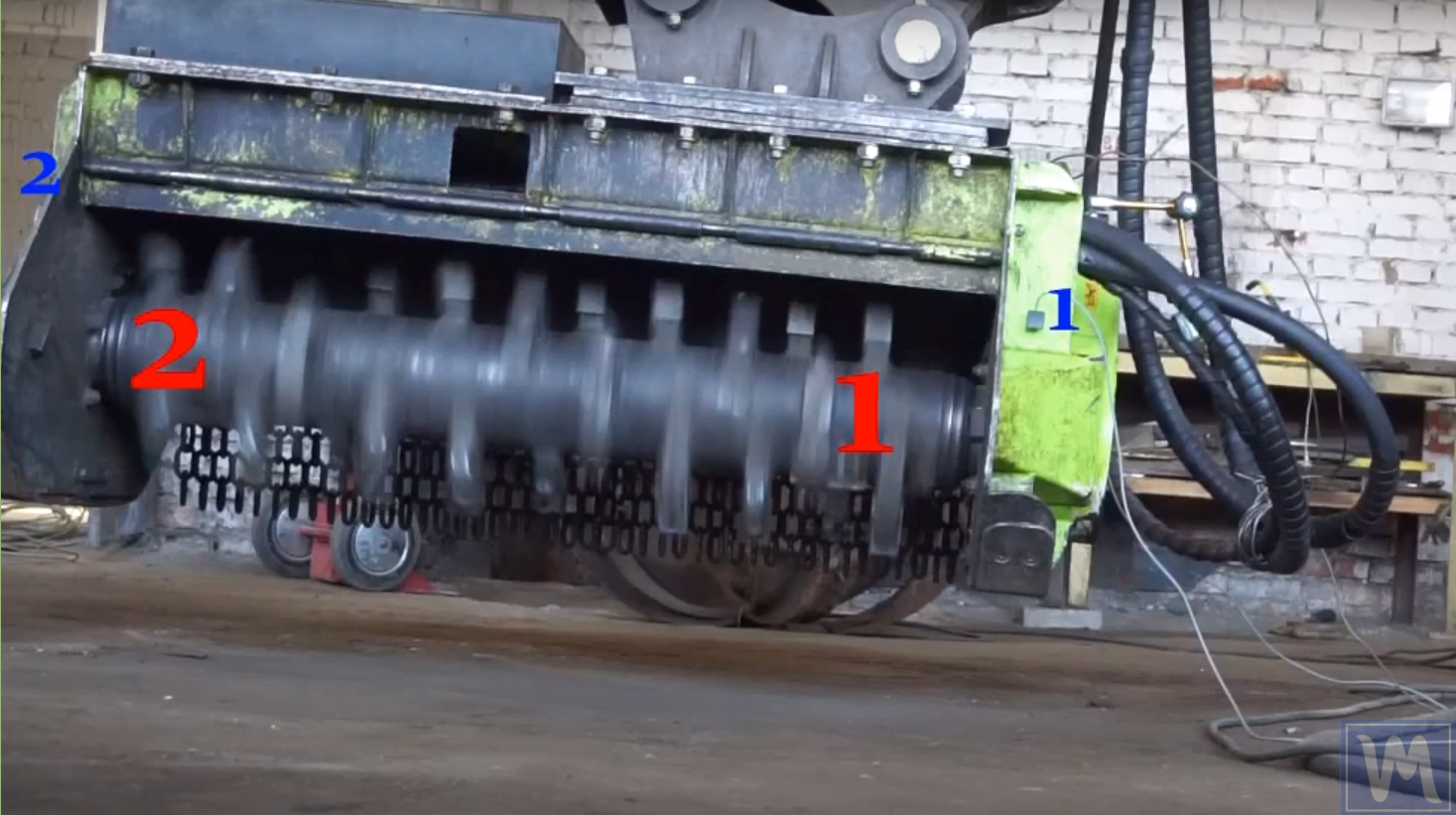
Az alábbiakban tipikus példák mutatják a korrekciós síkokat és az érzékelők elhelyezését a szokásos rotor-konfigurációkhoz.

4. A kétsíkú kiegyensúlyozási eljárás
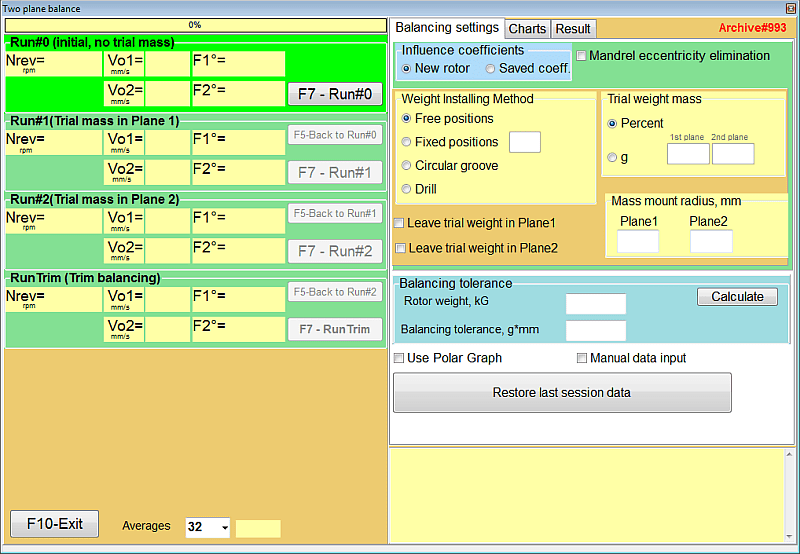
A gyakorlatban a kétsíkú kiegyensúlyozást általában a befolyásolási együttható módszerével végzik. A tipikus sorrend a következő:
- Futtassa az #0-t: alaprezgés (amplitúdó és fázis) mérése próbasúlyok nélkül.
- Futtassa az #1: helyezzen el egy próbasúlyt az 1. síkban, és mérje meg újra a rezgést.
- Futtassa az #2-t: helyezze a próbasúlyt a 2. síkba, és mérje meg újra a rezgést.
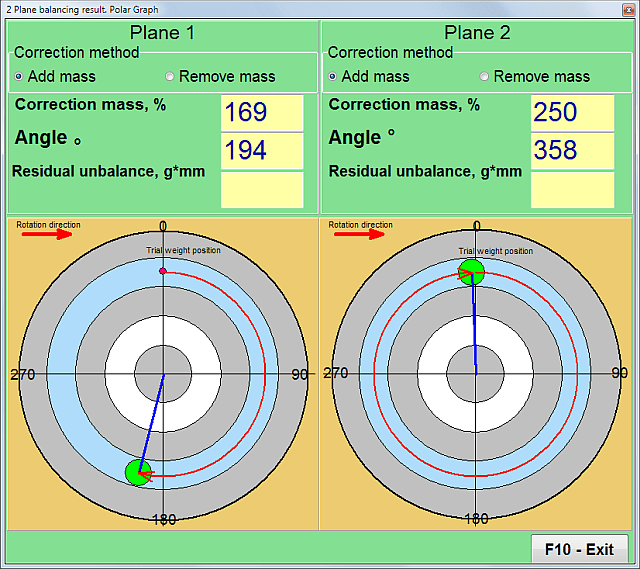
- Számítás: a szoftver kiszámítja az 1. és 2. sík korrekciós súlyait.
- Helyesbítés és ellenőrzés: távolítsa el a próbasúlyt, helyezzen be korrekciós súlyokat, és végezzen el egy ellenőrző futást (trimm-futást) az eredmény megerősítésére.
5. Kétsíkú kiegyensúlyozás Balanset-1A-val
Balanset-1A egy kétcsatornás, PC-alapú kiegyensúlyozó rendszer, amelyet egy- és kétsíkú rotor kiegyensúlyozására terveztek terepi körülmények között és termelési környezetben. Kétsíkú üzemmódban a Balanset-1A méri a rotor fordulatszámát és a vektort 1x rezgés (RMS és fázis) két csatornán, és kiszámítja a korrekciós súlyparamétereket mindkét síkhoz.
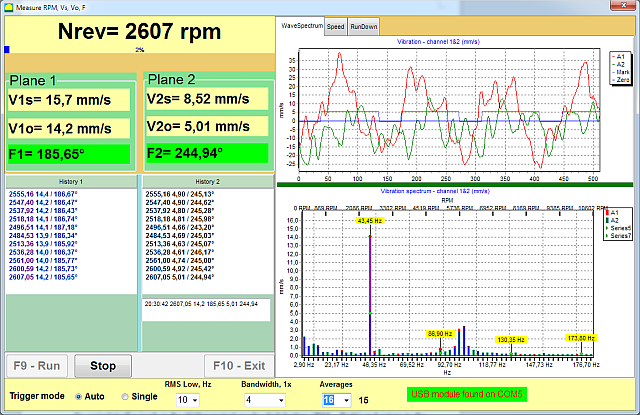
5.1 Szoftver: dinamikus kiegyensúlyozás beállítása és az eredmények megtekintése
5.2 Rezgésmérő üzemmód (gyors ellenőrzés kiegyensúlyozás előtt)
A kiegyenlítés előtt és közben a rezgésmérő üzemmód használható a rezgés ellenőrzésére és a mérések stabil működési feltételeinek megerősítésére.