დინამიური ბალანსირების (ორსიბრტყიანი ბალანსირების) ახსნა







1. განმარტება: რა არის დინამიკური დაბალანსება?
დინამიური დაბალანსება არის პროცედურა როტორში დისბალანსის გამოსასწორებლად, მასის კორექტირების მინიმუმში განხორციელებით. ორი ცალკეული თვითმფრინავი მისი სიგრძის გასწვრივ. ის გამოიყენება მაშინ, როდესაც კორექცია ერთ სიბრტყეში არასაკმარისია, რადგან როტორი შეიძლება შეერწყას სტატიკური (ძალოვანი) დისბალანსი and წყვილის დისბალანსი.
2. სტატიკური და დინამიკური არათანაბრობა: მთავარი განსხვავება
დინამიკური დაბალანსების გასაგებად, მნიშვნელოვანია არათანაბრობის ორი ძირითადი ფორმის გარჩევა.
- სტატიკური დისბალანსი: როტორის მასის ცენტრი გადახრილია მისი ბრუნვის ღერძიდან. ის ერთიან “მძიმე წერტილს” ჰგავს და მისი კორექტირება შესაძლებელია ერთი წონით, ერთ სიბრტყეში.
- დინამიური დისბალანსი: არათანაბარი მასა განაწილებულია როტორის გასწვრივ ისე, რომ ერთი სიბრტყის კორექცია საკმარისი არ არის. ეს მდგომარეობა ვლინდება როტაციისას და მოითხოვს კორექციებს ორ სხვადასხვა სიბრტყეში. ეს ხდება მაშინ, როდესაც როტორს აქვს ორი თანაბარი მძიმე წერტილი საპირისპირო ბოლოებში, რომლებიც 180°-ით არიან დაშორებული. ეს მდგომარეობა სტატიკურად დაბალანსებულია (მოსვენებისას მას მძიმე წერტილისკენ არ გადაეწევა), მაგრამ როდესაც ის ბრუნავს, ორი მძიმე წერტილი ქმნის მბრუნავ ძალას, ანუ "მომენტს", რომელიც როტორს თავიდან ფეხებამდე რხევას იწვევს. მომენტური არაბალანსი *მხოლოდ* შეიძლება გამოვლინდეს როტორის ბრუნვისას და *მხოლოდ* შეიძლება გამოსწორდეს ორ სხვადასხვა სიბრტყეში წონების განთავსებით საპირისპირო მომენტის შესაქმნელად.


3. კორექციის ზედაპირები და სენსორების განლაგება
ორბორბლიანი დაბალანსება ეფუძნება სამ რამეს:
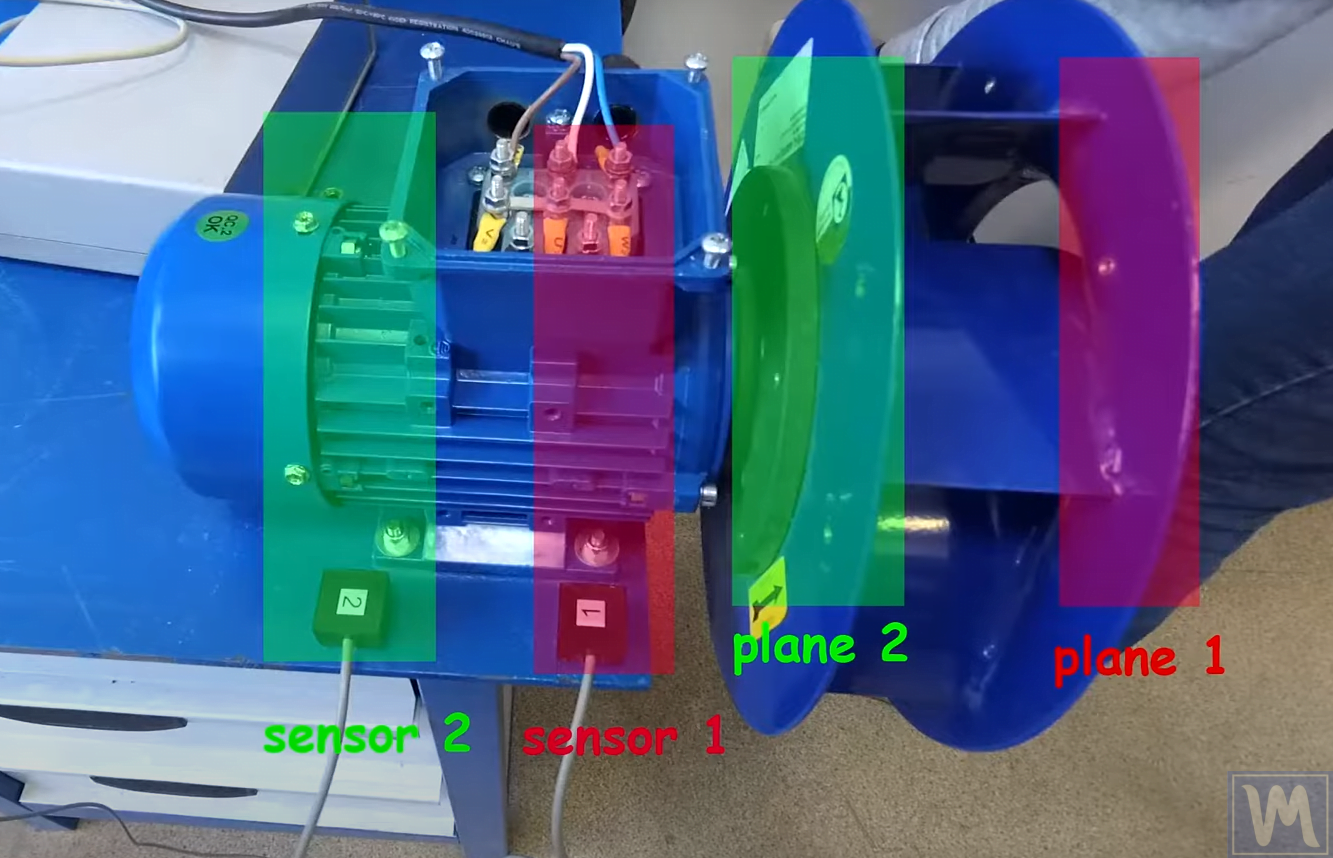
- ორი საკორექციო თვითმფრინავი (მანქანა 1 და მანქანა 2), სადაც დამონტაჟდება გამოსწორების წონები.
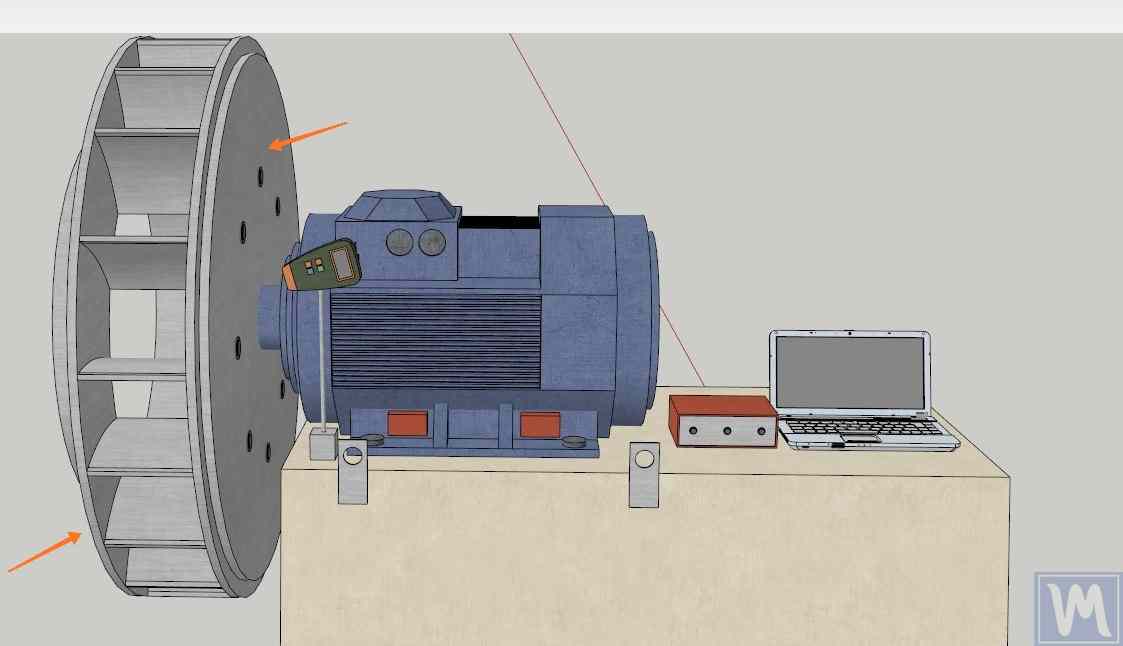
- ვიბრაციის გაზომვის ორი წერტილი (როგორც წესი, სკირების კორპუსების მახლობლად) დაკავშირებულია ორ არხთან.
- ფაზის მითითება (ტაქომეტრი + ასახვადი ნიშნი) სიჩქარისა და ფაზის გასაზომად.
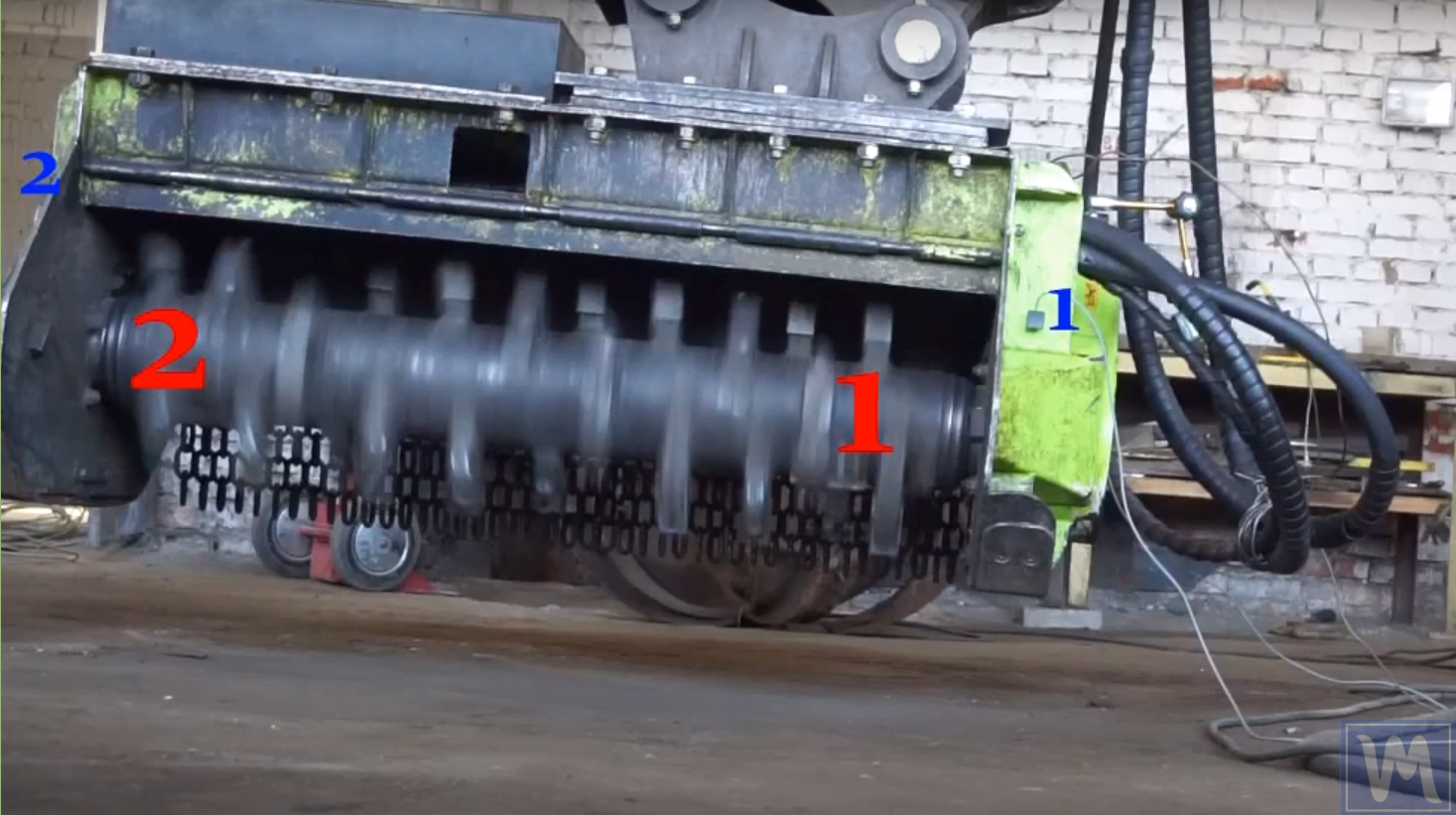
ქვემოთ მოცემულია ტიპური მაგალითები, რომლებიც აჩვენებს კორექციის ზედაპირებსა და სენსორების განლაგებას როტორის გავრცელებული კონფიგურაციებისთვის.

4. ორპლანიანი დაბალანსების პროცედურა
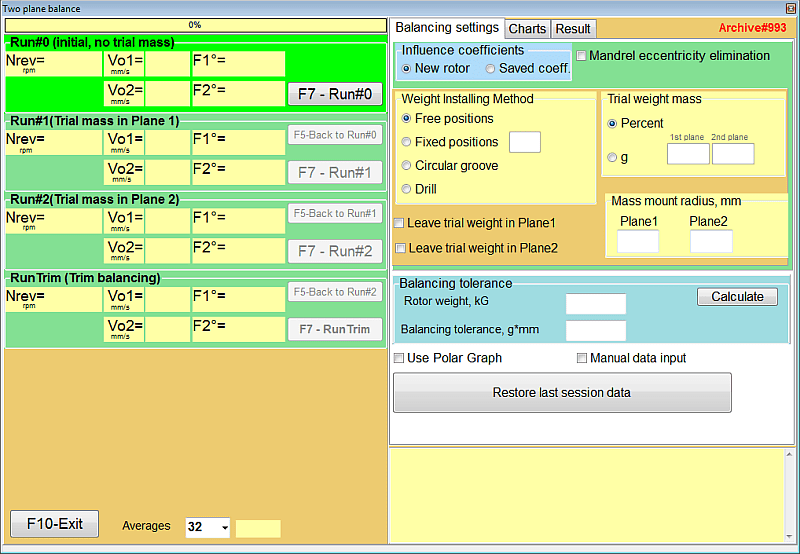
პრაქტიკაში, ორპლანიანი დაბალანსება, როგორც წესი, გავლენის კოეფიციენტების მეთოდით სრულდება. ტიპური თანმიმდევრობაა:
- გაუშვით #0: საბაზისო ვიბრაციის (ამპლიტუდა და ფაზა) გაზომვა საცდელი წონების გარეშე.
- გაუშვით #1: დააყენეთ საცდელი წონა პირველ თვითმფრინავში, ხელახლა გაზომეთ ვიბრაცია.
- გაუშვით #2: გადაიტანეთ საცდელი წონა მე-2 თვითმფრინავზე, ხელახლა გაზომეთ ვიბრაცია.
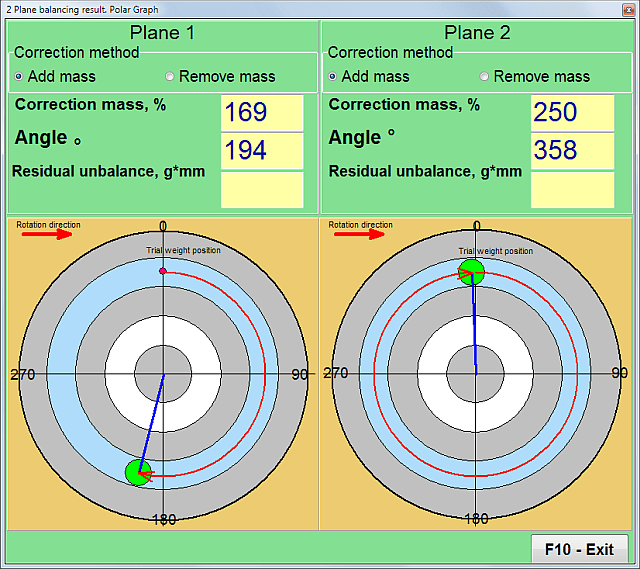
- გაანგარიშება: პროგრამული უზრუნველყოფა ითვლის კორექციის წონებს პირველი და მეორე სიბრტყისთვის.
- შესწორება და გადამოწმება: მოხსენით საცდელი წონა, დაამონტაჟეთ საკორექციო წონები და შეასრულეთ შემოწმების გაშვება (trim run) შედეგის დასადასტურებლად.
5. ორპლანიანი დაბალანსება Balanset-1A-თი
Balanset-1A არის ორარხიანი, პერსონალურ კომპიუტერზე დაფუძნებული დაბალანსების სისტემა, რომელიც განკუთვნილია ერთბორბლიანი და ორბორბლიანი როტორის დაბალანსებისთვის ექსპლუატაციურ და საწარმოო პირობებში. ორბორბლიან რეჟიმში Balanset-1A ზომავს როტორის სიჩქარეს და ვექტორს 1x ვიბრაცია (RMS და ფაზა) ორ არხზე და ითვლის კორექციის წონის პარამეტრებს ორივე სიბრტყისთვის.
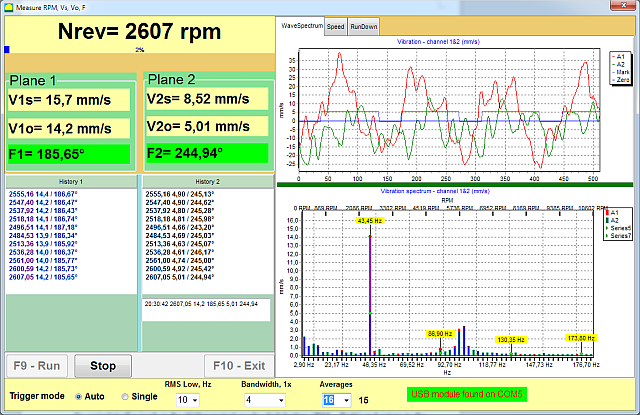
5.1 პროგრამული უზრუნველყოფა: დინამიკური დაბალანსების პარამეტრების დაყენება და შედეგების ნახვა
5.2 ვიბრომეტრის რეჟიმი (სწრაფი შემოწმება დაბალანსებამდე)
ბალანსირების წინ და პროცესში, ვიბრომეტრის რეჟიმი შეიძლება გამოყენებულ იქნას ვიბრაციის მონიტორინგისთვის და გაზომვებისთვის სტაბილური საექსპლუატაციო პირობების დასადასტურებლად.