Vysvětlení dynamického vyvažování (vyvažování ve dvou rovinách)







1. Definice: Co je dynamické vyvažování?
Dynamické vyvažování je postup pro korekci nevyváženosti rotoru provedením hmotnostních korekcí v minimálně dvě oddělené roviny po celé své délce. Používá se v případech, kdy korekce v jedné rovině nestačí, protože rotor může kombinovat. statická (silová) nerovnováha a párová nerovnováha.
2. Statická vs. dynamická nerovnováha: Klíčový rozdíl
Pro pochopení dynamického vyvážení je důležité rozlišovat mezi dvěma hlavními formami nevyváženosti.
- Statická nevyváženost: střed hmotnosti rotoru je posunutý od jeho osy otáčení. Chová se jako jedno “těžké místo” a lze jej korigovat jedním závažím v jedné rovině.
- Dynamická nevyváženost: nevyváženost je rozložena podél rotoru, takže korekce v jedné rovině nestačí. Tento stav se zjistí při otáčení a vyžaduje korekce ve dvou různých rovinách. K tomu dochází, když má rotor dvě stejně těžká místa na protilehlých koncích, umístěná od sebe o 180°. Tento stav je staticky vyvážený (v klidovém stavu se na těžké místo nenaklání), ale při otáčení vytvářejí obě těžká místa otáčivou sílu neboli "pár", který způsobuje kývání rotoru koncem nahoru. Nevyváženost páru lze zjistit *pouze* při otáčení rotoru a lze ji *pouze* korigovat umístěním závaží do dvou různých rovin, aby se vytvořil opačný pár.


3. Korekční roviny a umístění senzorů
Vyvažování ve dvou rovinách je založeno na třech věcech:
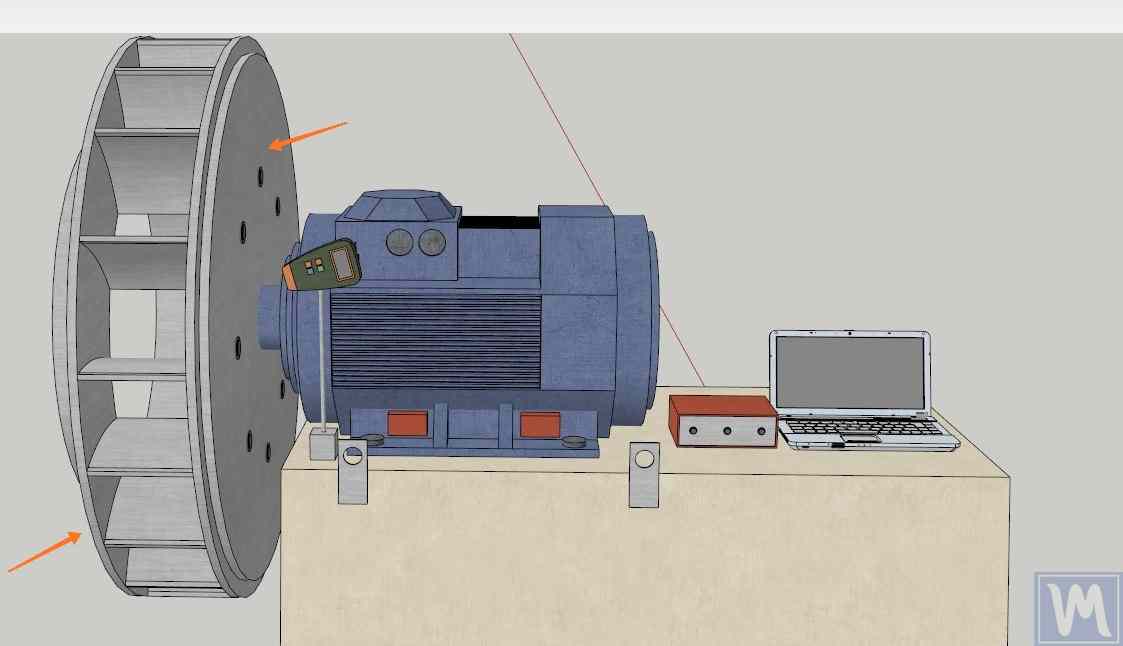
- Dvě korekční roviny (Plocha 1 a Plocha 2), kde budou instalována korekční závaží.
- Dva body měření vibrací (obvykle v blízkosti ložiskových skříní) připojené ke dvěma kanálům.
- Referenční fáze (otáčkoměr + reflexní značka) pro měření rychlosti a fáze.
Níže jsou uvedeny typické příklady rovin korekce a umístění snímačů pro běžné konfigurace rotoru.



4. Postup vyvažování ve dvou rovinách
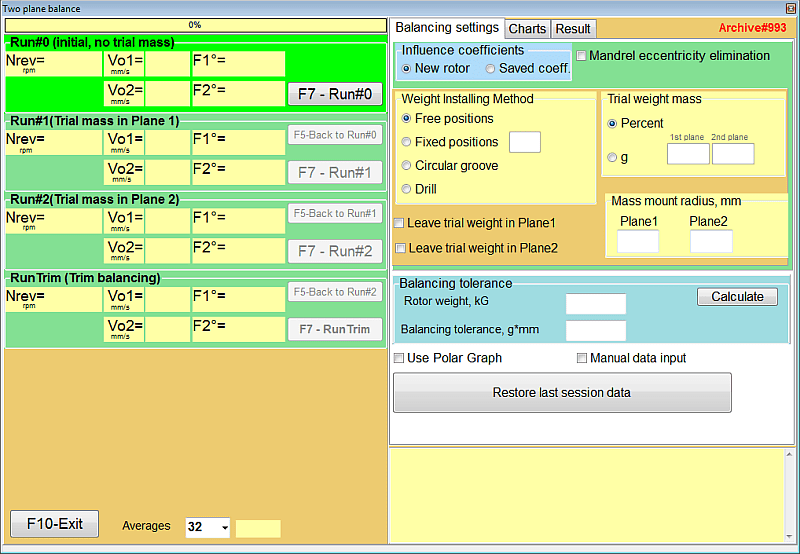
V terénu se vyvážení dvou rovin běžně provádí metodou koeficientu vlivu. Typická posloupnost je následující:
- Spusťte #0: změřit základní vibrace (amplitudu a fázi) bez zkušebních závaží.
- Spusťte #1: nainstalujte zkušební závaží do roviny 1 a znovu změřte vibrace.
- Spusťte #2: přesuňte zkušební závaží do roviny 2 a znovu změřte vibrace.
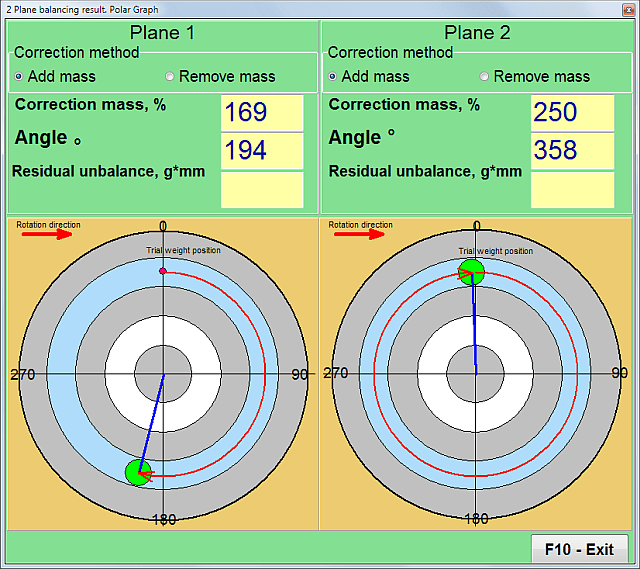
- Výpočet: software vypočítá korekční váhy pro rovinu 1 a rovinu 2.
- Oprava a ověření: odstraňte zkušební závaží, nainstalujte korekční závaží a proveďte ověřovací jízdu (trimovací jízdu), abyste potvrdili výsledek.
5. Vyvažování ve dvou rovinách pomocí sady Balanset-1A
Balanset-1A je dvoukanálový vyvažovací systém na bázi PC určený pro vyvažování rotorů v jedné a dvou rovinách v polních podmínkách a ve výrobním prostředí. V dvourovinném režimu měří Balanset-1A otáčky rotoru a vektor otáček. 1x vibrace (RMS a fáze) na dvou kanálech a vypočítá parametry korekční váhy pro obě roviny.
5.1 Software: nastavení dynamického vyvažování a zobrazení výsledků
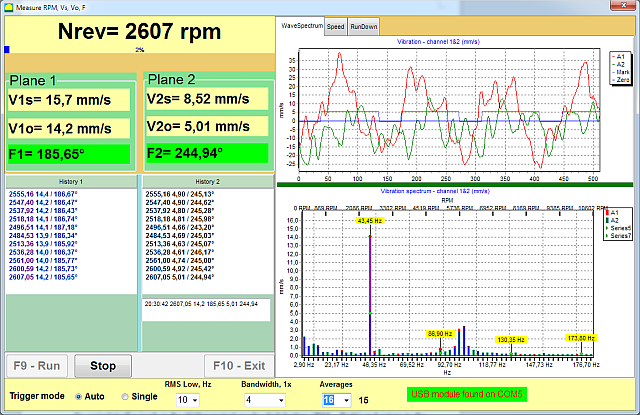
5.2 Režim vibrometru (rychlá kontrola před vyvážením)
Před vyvažováním a během něj lze režim vibrometru použít ke sledování vibrací a potvrzení stabilních provozních podmínek pro měření.