Dynamisches Auswuchten (Zwei-Ebenen-Auswuchten) erklärt







1. Definition: Was ist dynamisches Auswuchten?
Dynamisches Auswuchten ist ein Verfahren zur Korrektur der Unwucht eines Rotors durch Massenkorrekturen in einem Minimum zwei getrennte Flugzeuge entlang seiner Länge. Er wird eingesetzt, wenn die Korrektur in einer Ebene nicht ausreicht, weil der Rotor die statische Unwucht (Kraft) und Paarungleichgewicht.
2. Statisches vs. dynamisches Ungleichgewicht: Der Hauptunterschied
Zum Verständnis des dynamischen Auswuchtens ist es wichtig, zwischen den beiden Hauptformen des Ungleichgewichts zu unterscheiden.
- Statische Unwucht: Der Massenschwerpunkt des Rotors ist gegenüber seiner Drehachse versetzt. Er verhält sich wie ein einzelner “schwerer Punkt” und kann mit einem Gewicht in einer Ebene korrigiert werden.
- Dynamische Unwucht: Die Unwucht ist entlang des Rotors verteilt, so dass der Ausgleich in einer Ebene nicht ausreicht. Dieser Zustand wird bei der Rotation erkannt und erfordert Ausgleiche in zwei verschiedenen Ebenen. Dies ist der Fall, wenn ein Rotor zwei gleiche schwere Punkte an gegenüberliegenden Enden hat, die 180° voneinander entfernt sind. Dieser Zustand ist statisch ausgewuchtet (im Ruhezustand rollt er nicht auf einen schweren Punkt zu), aber wenn er sich dreht, erzeugen die beiden schweren Punkte eine Drehkraft, die den Rotor zum Taumeln bringt. Eine Unwucht kann *nur* festgestellt werden, wenn sich der Rotor dreht, und sie kann *nur* korrigiert werden, indem Gewichte in zwei verschiedenen Ebenen angebracht werden, um ein entgegengesetztes Paar zu erzeugen.


3. Korrekturebenen und Sensorplatzierung
Das Auswuchten in zwei Ebenen basiert auf drei Faktoren:
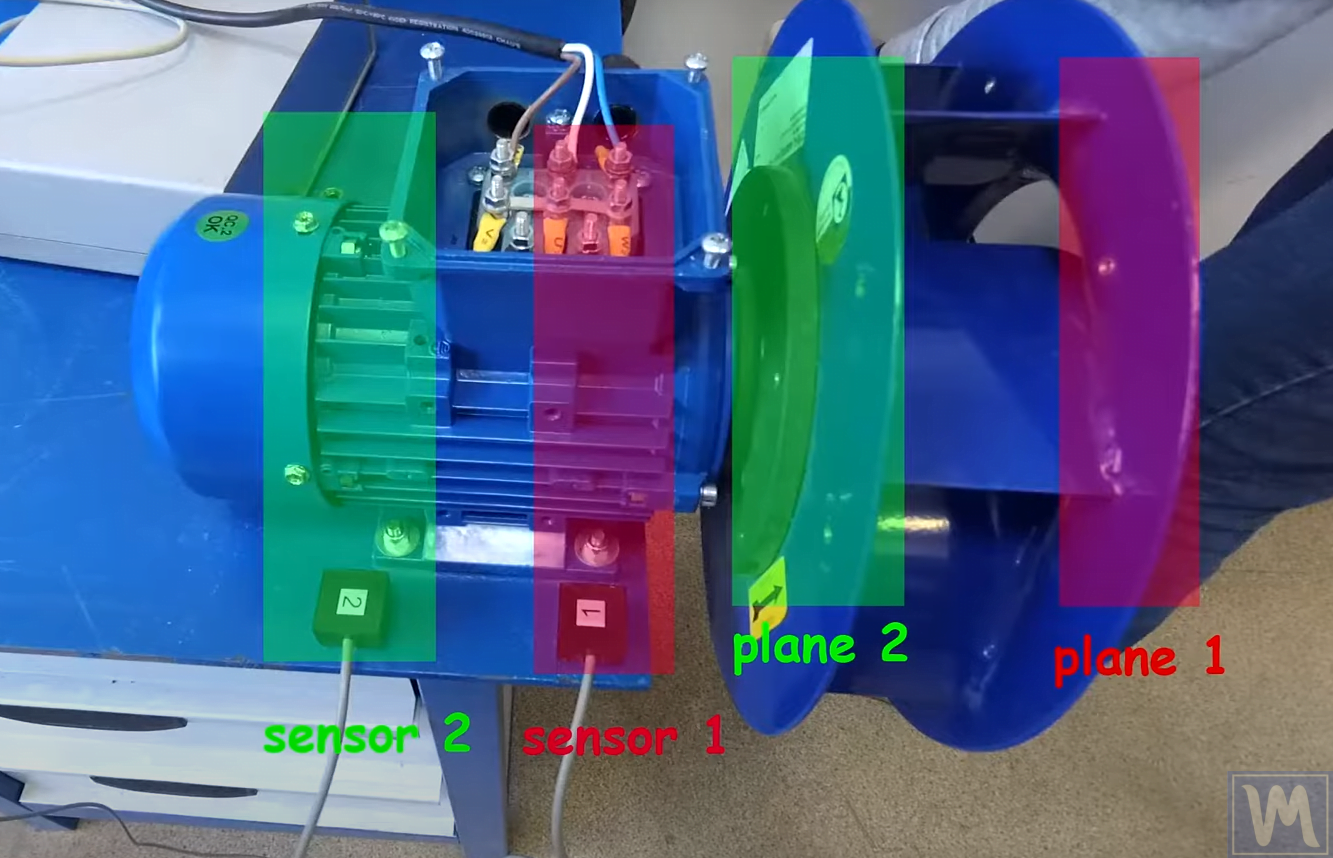
- Zwei Korrekturebenen (Ebene 1 und Ebene 2), wo die Korrekturgewichte angebracht werden.
- Zwei Vibrationsmesspunkte (typischerweise in der Nähe von Lagergehäusen), die mit zwei Kanälen verbunden sind.
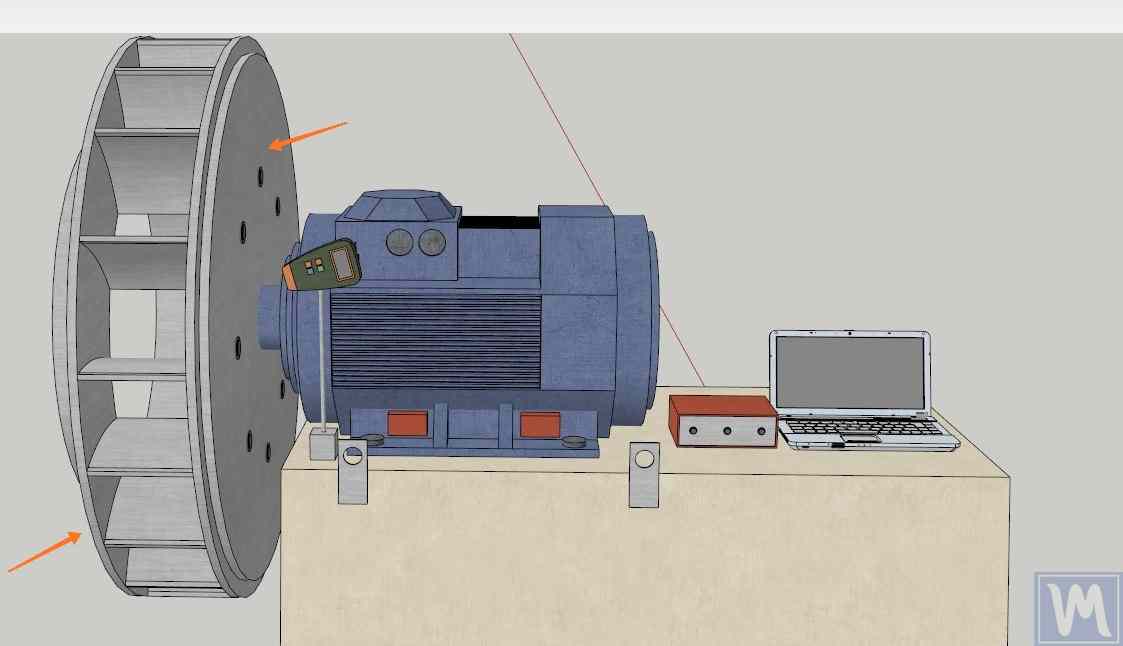
- Eine Phasenreferenz (Tachometer + Reflexionsmarke) zur Messung von Geschwindigkeit und Phase.
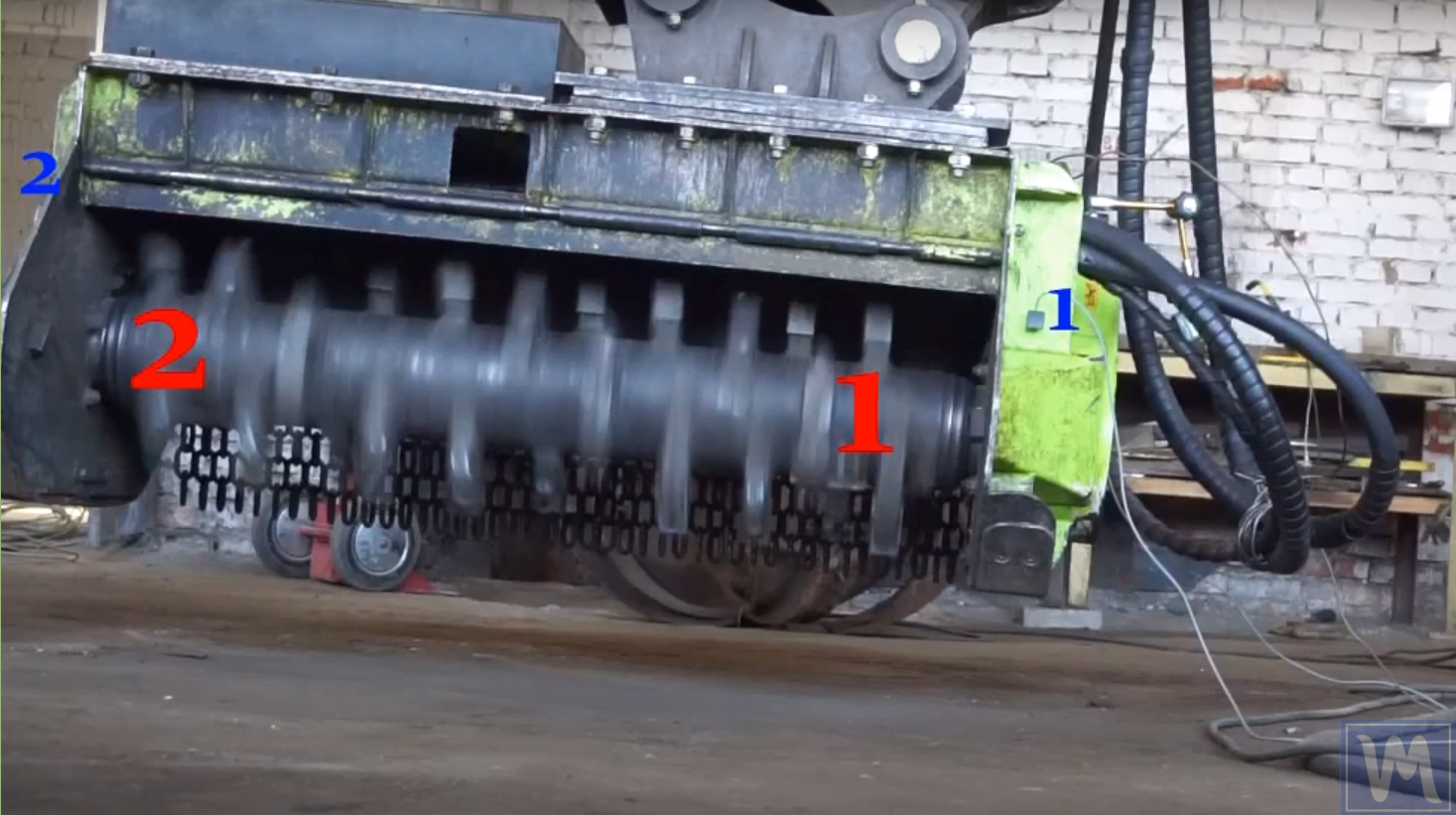
Nachfolgend finden Sie typische Beispiele für Korrekturebenen und Sensorplatzierungen für gängige Rotorkonfigurationen.

4. Das Zwei-Ebenen-Ausgleichsverfahren
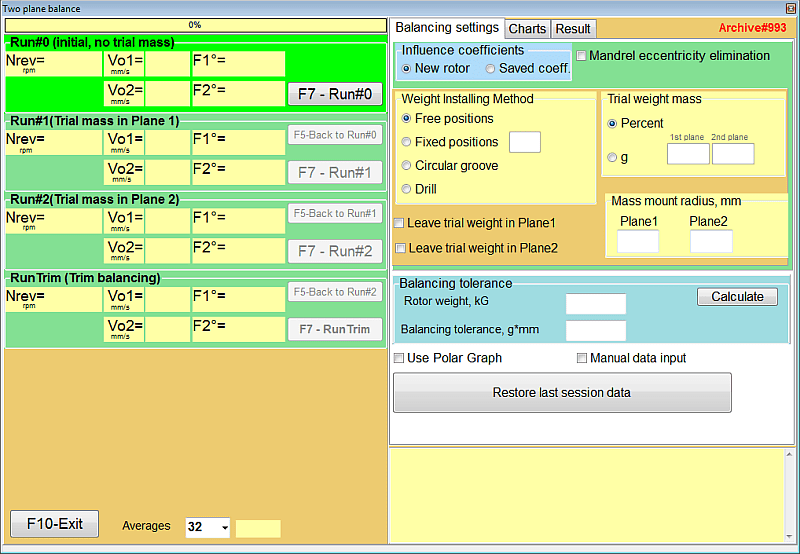
In der Praxis wird das Auswuchten in zwei Ebenen üblicherweise mit der Einflusskoeffizientenmethode durchgeführt. Die typische Reihenfolge ist:
- Führen Sie #0 aus: Messung einer Grundschwingung (Amplitude und Phase) ohne Prüfgewichte.
- Führen Sie #1 aus: Installieren Sie ein Testgewicht in Ebene 1 und messen Sie die Schwingungen erneut.
- Führen Sie #2 aus: Bringen Sie das Testgewicht in die Ebene 2 und messen Sie die Schwingungen erneut.
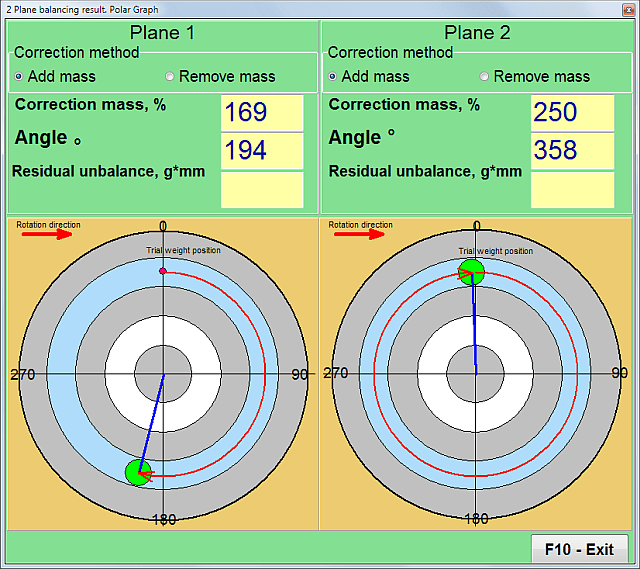
- Berechnung: berechnet die Software die Korrekturgewichte für Ebene 1 und Ebene 2.
- Berichtigung und Überprüfung: Entfernen Sie das Testgewicht, bringen Sie Korrekturgewichte an und führen Sie einen Verifizierungslauf (Trimmlauf) durch, um das Ergebnis zu bestätigen.
5. Zwei-Ebenen-Ausgleich mit Balanset-1A
Balanset-1A ist ein zweikanaliges, PC-basiertes Auswuchtsystem, das für das Auswuchten von Rotoren in einer oder zwei Ebenen unter Feld- und Produktionsbedingungen entwickelt wurde. Im Zwei-Ebenen-Modus misst das Balanset-1A die Rotordrehzahl und den Vektor der 1x Vibration (RMS und Phase) auf zwei Kanälen und berechnet die Korrekturgewichtsparameter für beide Ebenen.
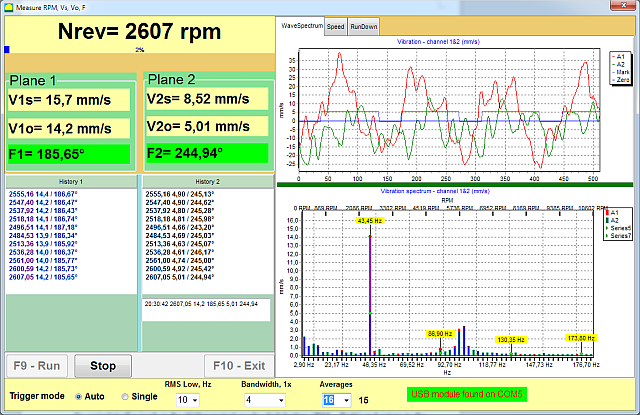
5.1 Software: Einrichtung des dynamischen Auswuchtens und Ergebnisanzeige
5.2 Vibrometermodus (Schnellprüfung vor dem Auswuchten)
Vor und während des Auswuchtens kann der Vibrometermodus verwendet werden, um Schwingungen zu überwachen und stabile Betriebsbedingungen für Messungen zu bestätigen.