איזון דינמי (איזון דו-מישורי) מוסבר







1. הגדרה: מהו איזון דינמי?
איזון דינמי הוא הליך לתיקון חוסר איזון ברוטור על ידי ביצוע תיקוני מסה במינימום של שני מטוסים נפרדים לאורך כל אורכו. הוא משמש כאשר תיקון במישור אחד אינו מספיק, מכיוון שהרוטור יכול לשלב חוסר איזון סטטי (כוח) and חוסר איזון זוגי.
2. חוסר איזון סטטי לעומת חוסר איזון דינמי: ההבדל המרכזי
כדי להבין את האיזון הדינמי, חשוב להבחין בין שני סוגי חוסר האיזון העיקריים.
- חוסר איזון סטטי: מרכז המסה של הרוטור מוסט מציר הסיבוב שלו. הוא מתנהג כמו “נקודה כבדה” אחת וניתן לתקן זאת באמצעות משקל אחד במישור אחד.
- חוסר איזון דינמי: חוסר האיזון מופץ לאורך הרוטור, כך שתיקון במישור אחד אינו מספיק. מצב זה מתגלה בסיבוב ודורש תיקונים בשני מישורים שונים. מצב זה מתרחש כאשר לרוטור יש שני נקודות כבדות שוות בקצוות מנוגדים, הממוקמות במרחק של 180° זו מזו. מצב זה מאוזן סטטית (הוא לא יתגלגל לנקודה כבדה כאשר הוא במנוחה), אך כאשר הוא מסתובב, שתי הנקודות הכבדות יוצרות כוח סיבוב, או "מומנט", הגורם לרוטור להתנדנד מקצה לקצה. חוסר איזון מומנט ניתן לאיתור *רק* כאשר הרוטור מסתובב וניתן לתקנו *רק* על ידי הצבת משקולות בשני מישורים שונים כדי ליצור מומנט נגדי.


3. מישורי תיקון ומיקום חיישנים
איזון דו-מימדי מבוסס על שלושה דברים:
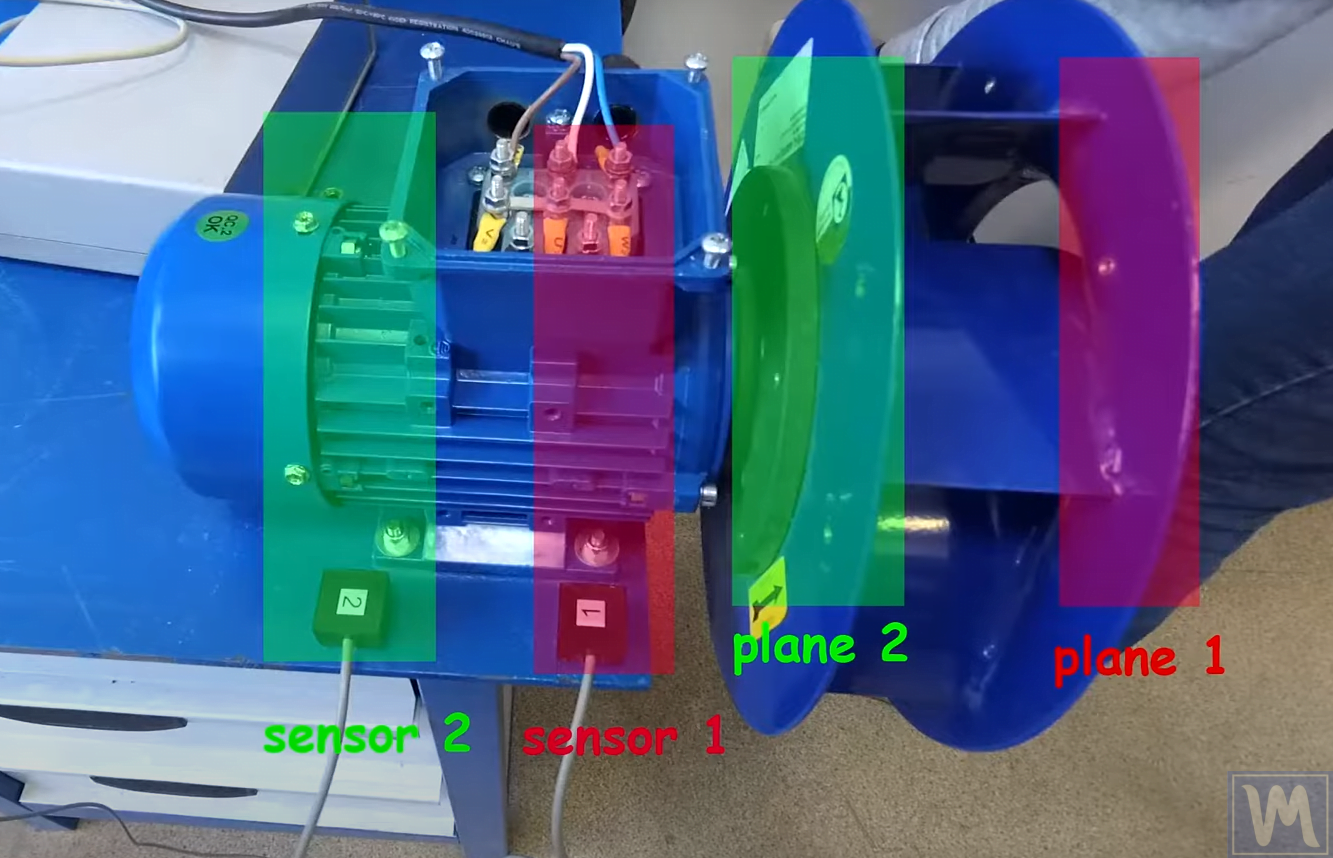
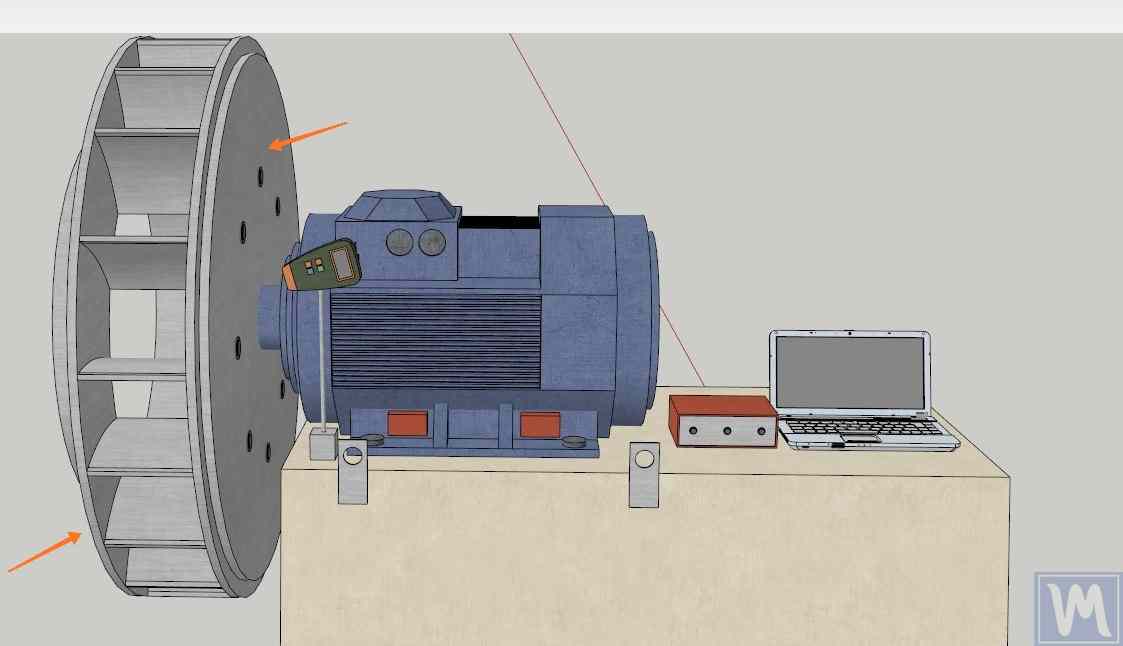
- שני מישורי תיקון (מטוס 1 ומטוס 2) בהם יותקנו משקולות תיקון.
- שתי נקודות מדידת רטט (בדרך כלל ליד בתי מיסבים) המחוברים לשני ערוצים.
- הפניה לשלב (מד מהירות + סימן מחזיר אור) למדידת מהירות ושלב.
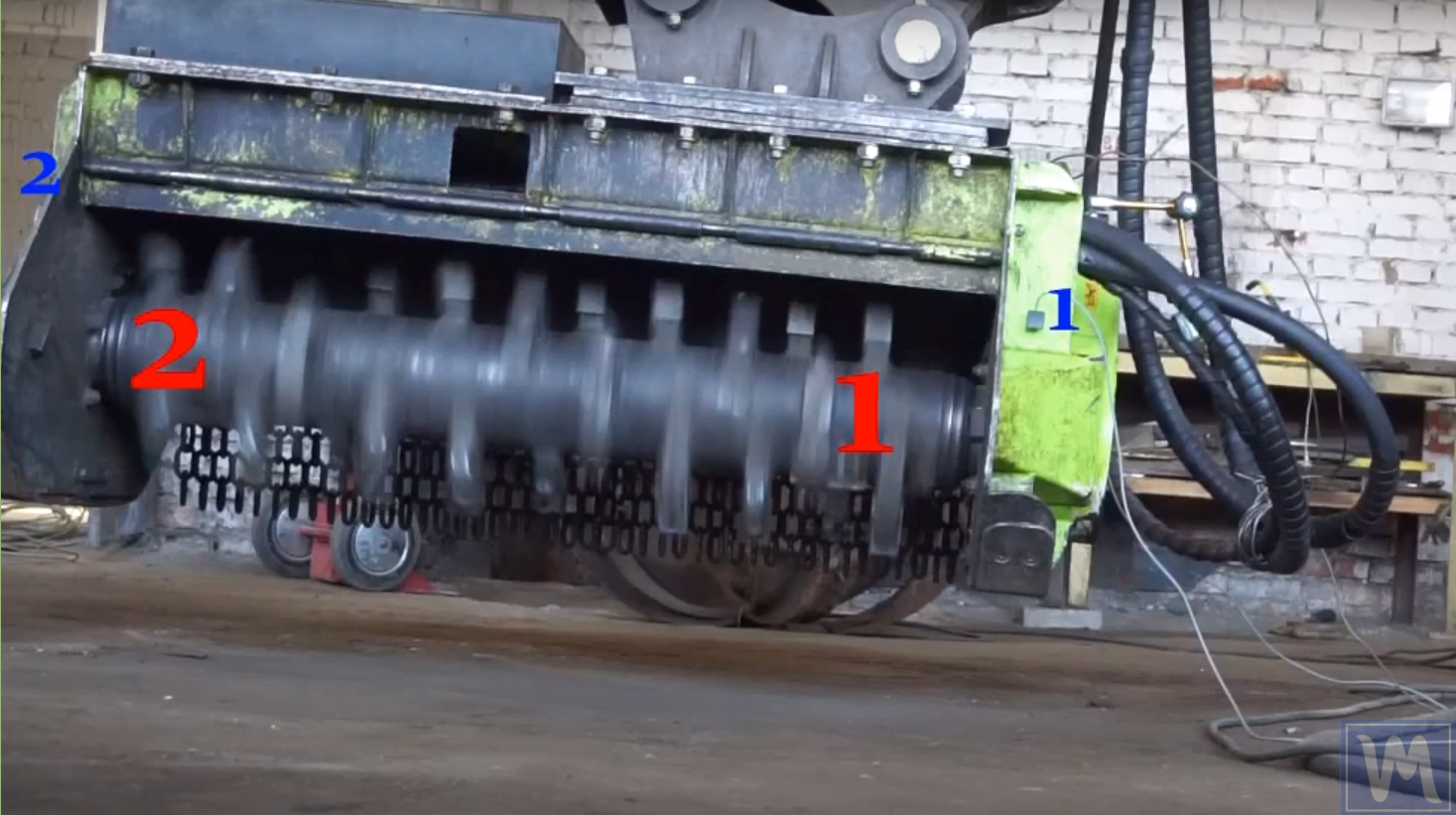
להלן דוגמאות אופייניות המראות מישורי תיקון ומיקום חיישנים עבור תצורות רוטור נפוצות.

4. הליך האיזון הדו-מימדי
בשטח, איזון דו-מישורי מבוצע בדרך כלל באמצעות שיטת מקדם ההשפעה. הרצף הטיפוסי הוא:
- הפעל #0: מדוד את רמת הרטט הבסיסית (אמפליטודה ופאזה) ללא משקולות ניסיון.
- הפעל #1: התקן משקל ניסיון במישור 1, מדוד שוב את הרטט.
- הפעל #2: העבר את משקל הניסוי למישור 2, מדוד שוב את הרטט.
- תַחשִׁיב: התוכנה מחשבת משקלי תיקון עבור מישור 1 ומישור 2.
- תיקון ואימות: הסר את משקל הניסיון, התקן משקלי תיקון ובצע ריצת אימות (ריצת כיול) כדי לאשר את התוצאה.
5. איזון דו-מישורי עם Balanset-1A
Balanset-1A היא מערכת איזון דו-ערוצית מבוססת מחשב, המיועדת לאיזון רוטורים חד-מישורי ודו-מישורי בתנאי שטח ובסביבות ייצור. במצב דו-מישורי, Balanset-1A מודדת את מהירות הרוטור ואת הווקטור של 1x vibration (RMS ופאזה) בשני ערוצים ומחשב פרמטרים של משקל תיקון עבור שני המישורים.
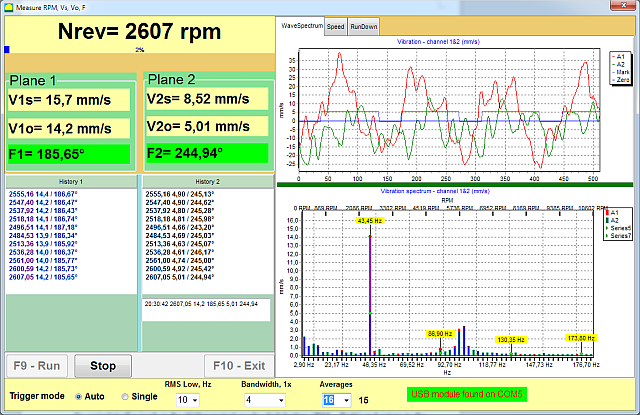
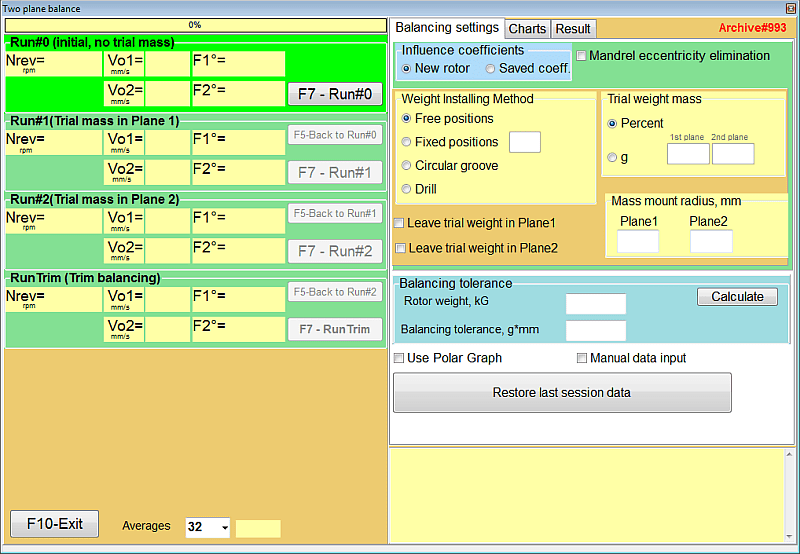
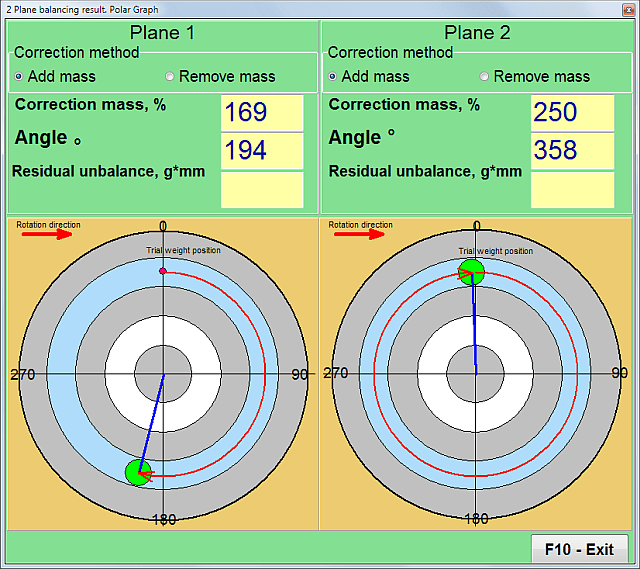
5.1 תוכנה: הגדרת איזון דינמי ותצוגת תוצאות
5.2 מצב ויברומטר (בדיקה מהירה לפני איזון)
לפני האיזון ובמהלכו, ניתן להשתמש במצב ויברומטר כדי לפקח על הרטט ולאשר תנאי פעולה יציבים למדידות.