Dynamisch balanceren (twee-vlaks balanceren) uitgelegd







1. Definitie: Wat is Dynamisch balanceren?
Dynamisch balanceren is een procedure voor het corrigeren van onbalans in een rotor door massacorrecties uit te voeren in minimaal twee afzonderlijke vliegtuigen over zijn lengte. Het wordt gebruikt als correctie in één vlak niet voldoende is, omdat de rotor kan combineren statische (kracht) onbalans en paar onevenwicht.
2. Statische versus dynamische onbalans: Het belangrijkste verschil
Om dynamisch balanceren te begrijpen, is het belangrijk om onderscheid te maken tussen de twee belangrijkste vormen van onbalans.
- Statische onbalans: het massamiddelpunt van de rotor verschuift van zijn rotatieas. Het gedraagt zich als een enkele “zware plek” en kan worden gecorrigeerd met één gewicht in één vlak.
- Dynamische onbalans: De onbalans wordt langs de rotor verdeeld zodat correctie in één vlak niet voldoende is. Deze toestand wordt gedetecteerd tijdens rotatie en vereist correcties in twee verschillende vlakken. Dit gebeurt wanneer een rotor twee gelijke zware punten heeft aan tegenovergestelde uiteinden, die 180° uit elkaar liggen. Deze toestand is statisch in evenwicht (hij rolt niet naar een zwaar punt wanneer hij in rust is), maar wanneer hij roteert, creëren de twee zware punten een draaikracht, of "koppel", waardoor de rotor heen en weer wiebelt. De onbalans van het koppel kan *alleen* worden gedetecteerd wanneer de rotor draait en kan *alleen* worden gecorrigeerd door gewichten in twee verschillende vlakken te plaatsen om een tegengesteld koppel te creëren.


3. Correctievlakken en plaatsing van sensoren
Balanceren op twee vlakken is gebaseerd op drie dingen:
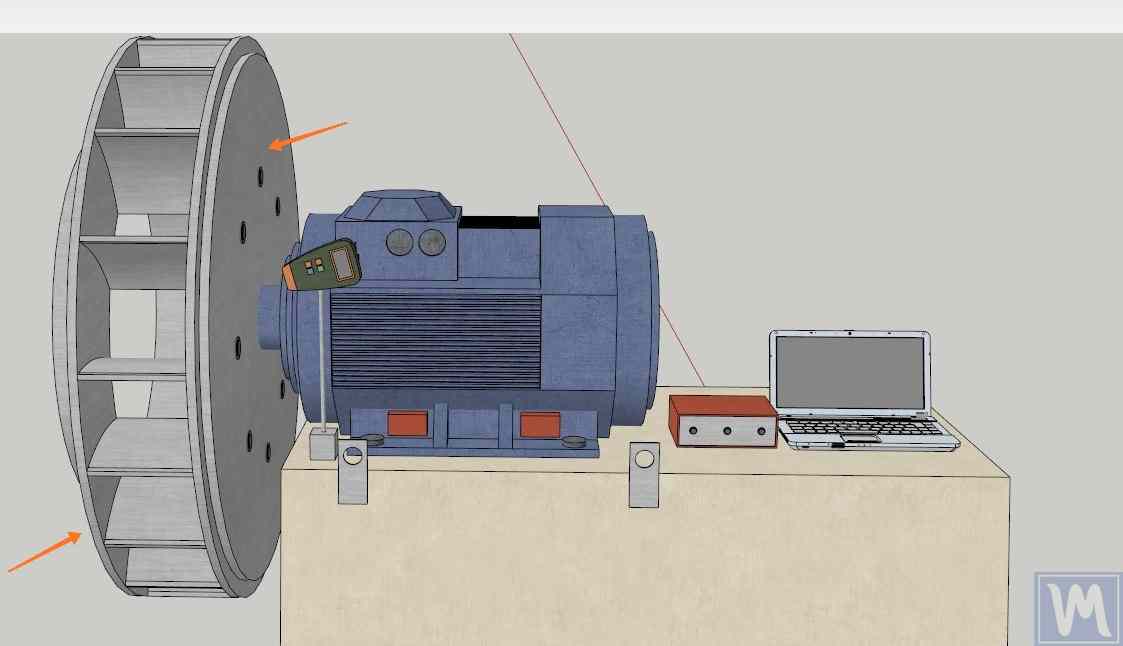
- Twee correctievlakken (Vlak 1 en Vlak 2) waar de correctiegewichten zullen worden aangebracht.
- Twee meetpunten voor trillingen (meestal in de buurt van lagerhuizen) verbonden met twee kanalen.
- Een fasereferentie (toerenteller + reflecterende markering) om snelheid en fase te meten.
Hieronder staan typische voorbeelden van correctievlakken en plaatsing van sensoren voor gangbare rotorconfiguraties.



4. De tweevlaks balanceerprocedure
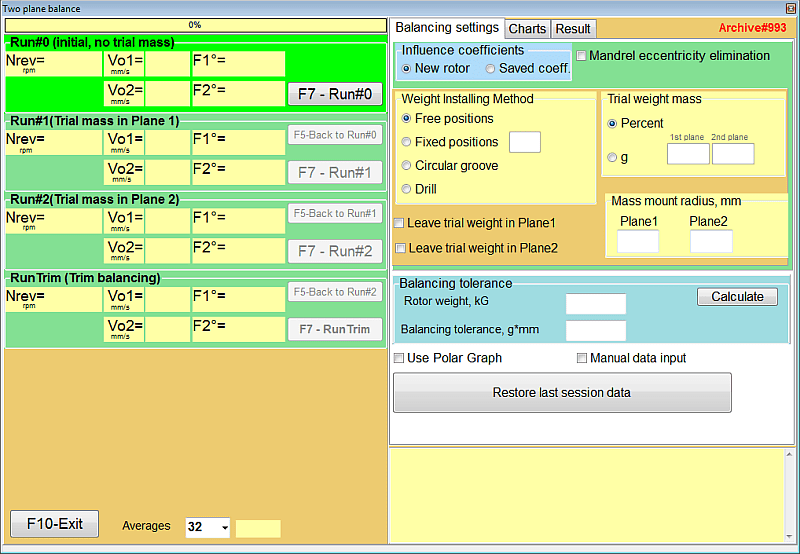
In het veld wordt balanceren op twee vlakken gewoonlijk uitgevoerd met behulp van de invloedscoëfficiëntmethode. De typische volgorde is:
- Voer #0 uit: meet een basistrilling (amplitude en fase) zonder proefgewichten.
- Voer #1 uit: installeer een testgewicht in vlak 1, meet opnieuw de trillingen.
- Voer #2 uit: Verplaats het testgewicht naar vlak 2 en meet opnieuw de trillingen.
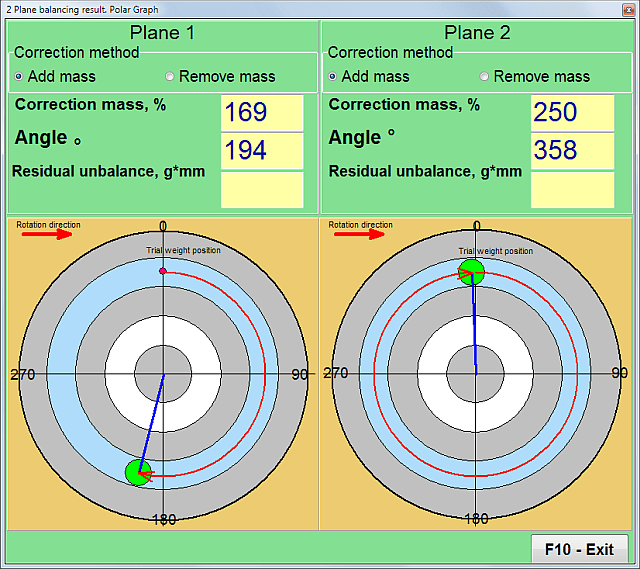
- Berekening: berekent de software correctiegewichten voor vlak 1 en vlak 2.
- Correctie en verificatie: Verwijder het testgewicht, installeer correctiegewichten en voer een verificatierun (trimrun) uit om het resultaat te bevestigen.
5. Balanceren in twee vlakken met Balanset-1A
Balanset-1A is een tweekanaals, pc-gebaseerd balanceersysteem dat is ontworpen voor het balanceren van rotoren in één en twee vlakken onder veldomstandigheden en productieomgevingen. In de tweevlaksmodus meet de Balanset-1A de rotorsnelheid en de vector van de rotor. 1x trilling (RMS en fase) op twee kanalen en berekent correctiegewichtparameters voor beide vlakken.
5.1 Software: dynamische balancering instellen en resultaten bekijken
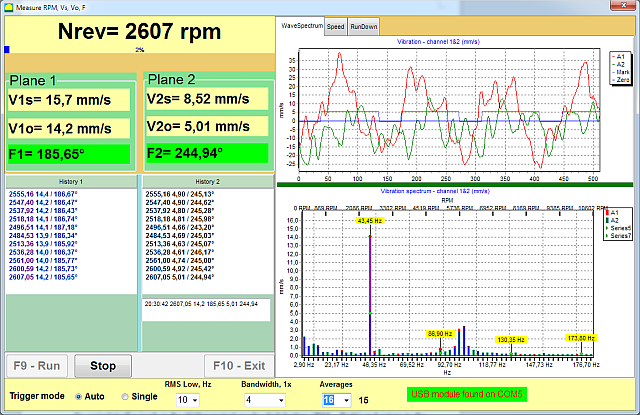
5.2 Vibrometermodus (snelle controle voor het balanceren)
Voor en tijdens het balanceren kan de vibrometermodus worden gebruikt om trillingen te controleren en stabiele werkomstandigheden voor metingen te bevestigen.